Robot hand that I built for my final year project using basic servos, a PCA9685 and an ESP32.
It can perform various grasps like pinch, Cylindrical and sphere grasps.
It was a fun project and I plan to keep working on it and developing it!
Unrelated but, my future theory is that in the future with many humans living in space with low gravity and many humans on earth relying on mobility devices like Mechas, exoskeleton, etc., Humans would gradually loose their lower limbs through evolution.
Unitree Unveils: GD01, A Manned Transformable Mecha, from $650,000 👏
The world's first production-ready manned mecha. It can transform. It's a civilian vehicle. It weighs ~500kg with you inside.
Please everyone be sure to use the robot in a Friendly and Safe manner.
Everytime I watch futuristic movies of people who have lived in low gravity for a long time, or superheroes who can levitate, or people using mecha suits for everything. My first thought is always "how do they still have strong limbs that can support their body weight on earth?"
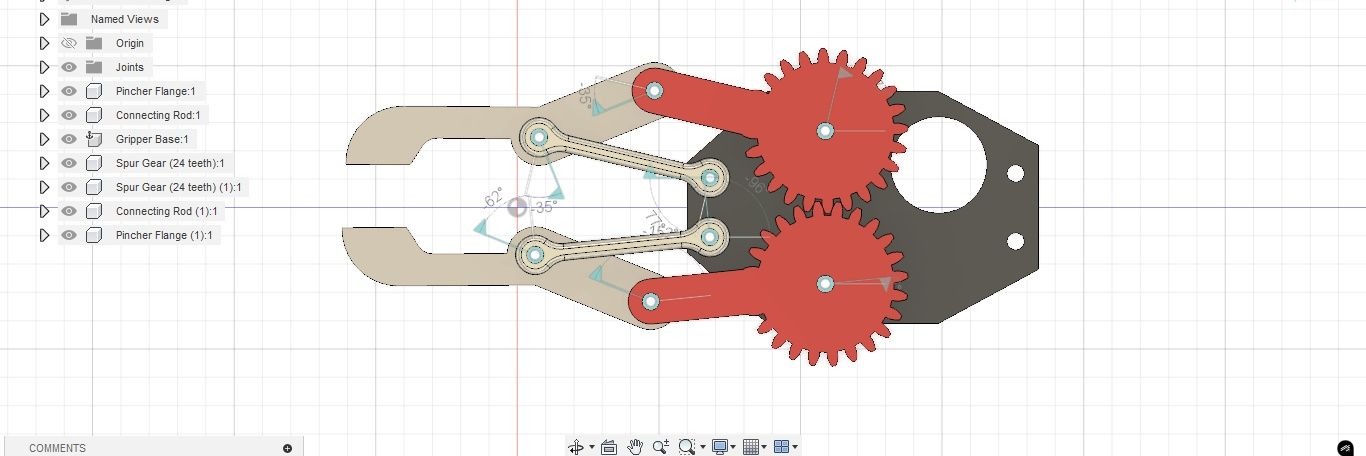
@kerotaro27 Nevermind, after looking at the parametric design, it's obvious that you designed it yourself, which is impressive!
You seem to be getting better at CAD Modeling 👏👏.
My previous comment was a mistake, sorry!
@kerotaro27 Did you make ChatGPT create a fusion script for this design?🤔
The design is impressive!👏 Last time I used AI to create a fusion script it wasn't giving me what I wanted and could only do basic shapes, also many scripts were working 😆
But that was a long time ago
Robot hand that I built for my final year project using basic servos, a PCA9685 and an ESP32.
It can perform various grasps like pinch, Cylindrical and sphere grasps.
It was a fun project and I plan to keep working on it and developing it!
Really cool!!
I've heard a lot about OpenClaw and want to try it, but I don't know how easy it is to set up, I'm not very good with coding.
I also don't know what it can do🤔, can I use it to automate websites or send applications?
@kerotaro27 Switching between pre-programmed grasps sounds like a great Idea 💡 😀.
Thanks for the idea Kerotaro!
I was thinking of an easy way to add sensors,
But now that you mentioned it, maybe I can use a camera to detect objects and determine the correct grasp type for eash object🤔
@kerotaro27 No 😆, my skills aren't that good yet 😭
Right now I'm using manual programming to set the angles of each servo.
In the future, I plan to set up a way to control it naturally, maybe I'll have to create a special glove or use a remote controller.
@kerotaro27 Sounds impressive, can I do it on my laptop without external hardware.
Most people seem to be buying Mac Mini or Raspberry pi to run OpenClaw, can I run it on my laptop? 🤔
@kadobeya_lab Haha 🤣, it also takes a long time for me to finish projects, so I understand.
I have notifications on your posts, so I'll continue to observe 🧑🏿💻🙇🏿♂️
3/n. The hand is too large which causes it to wobble a lot and make it hard to deal with small objects.
4. Manually programming every move is a dead end, I would like to add some sort of feedback mechanism in the future, or come up with a way to controll it remotely
End 🧵
Long duration testing for Pinching and Grabbing.
Some observations🧵:
1/n. After some time the servos start to heat up even when they arent moving, and although the PCA9685 supplies PWM signals, there still seems to be jittering in the servos.
2/n. It seems like there is no need for a proximal phalange in this type of hand, it only adds length to the fingers, and as the length increases, the touque needed to operate the proximal servos also increases.
In future iterations i'll have to remove the proximal phalange