OM1 is OpenMind’s modular, hardware-agnostic runtime layer that connects robots to the intelligence systems they need to perceive, decide, and act.
It started in Python, which was great for moving fast early on. But real robots need low latency, reliable timing, and true concurrency at the edge.
That’s why OM1 is now written in Go, to bring faster response times, tighter control loops, lower CPU and memory use, simpler deployment, and a stronger foundation for autonomy across real robots.
Check out the article below to see how OpenMind is building the runtime layer for robot intelligence.
OpenMind’s BrainPack is now open-sourced to the robotics community!
BrainPack is our custom hardware solution for robots including the Unitree G1, Unitree Go2, and LimX Tron 1.
Designed to power full robot autonomy, we make robotics development faster and easier.
Build your BrainPack using our repo below.
OM1 now includes Multi-Language Support, seamlessly transitioning between languages mid conversation with no additional setup.
This means users can speak in their native language and receive responses back either in the same language or in any language of their choice.
We've made conversing with robots universal for homes and workplaces, eliminating language barriars.
We were excited to present at #MSBuild this year, demoing OM1 running on a Unitree Go2 and in @nvidia’s Isaac Sim.
Thank you to @Microsoft and @github for the invitation. We’re looking forward to helping leading technology companies think through real-world robot deployments
Robotics is becoming one of the hottest industries.
We've had the great pleasure of partnering with @UnitreeRobotics to tackle robot autonomy.
In this interview, we ask Unitree's Head of North America Business about how they view the software opportunity in collaboration with OpenMind.
Our engineer @prachi1615 will be at #MSBuild this year, talking about OM1: Modular by Design, Hardware-Agnostic by Default. Your gateway to next-gen robotics.
Join for a live demo of autonomous robots, real-time interactions, and a look at how OM1 enables hardware-agnostic robotics.
Hope to see you in San Francisco, June 2–3.
Link to watch below:
Yesterday, we presented at the @KraneShares SF Innovation Forum.
KraneShares’ Global Humanoid Robotics and Physical AI Index ETF, $KOID, is one way retail and institutional investors can gain exposure to robotics and physical AI. OpenMind Founder @JanLiphardt and AI expert @chipro shared their perspectives on the industry tailwinds driving this market forward.
We’re excited to work closely with KraneShares to help bring robot adoption to the masses. Stay tuned for more soon.
Come watch our engineer @prachi1615 present this Friday at @Github's Open Source Friday!
She will be presenting OpenMind's OM1 platform and walk through how developers can start building on it.
Link to watch below:
Our Unitree Go2s are getting better at navigating real-world clutter.
In this demo, it can now self-detour from corners and avoid obstacles using adjusted MPPI parameters.
Fully autonomous navigation means being able to move without bumping into potentially critical objects. In workplaces and homes this is especially important.
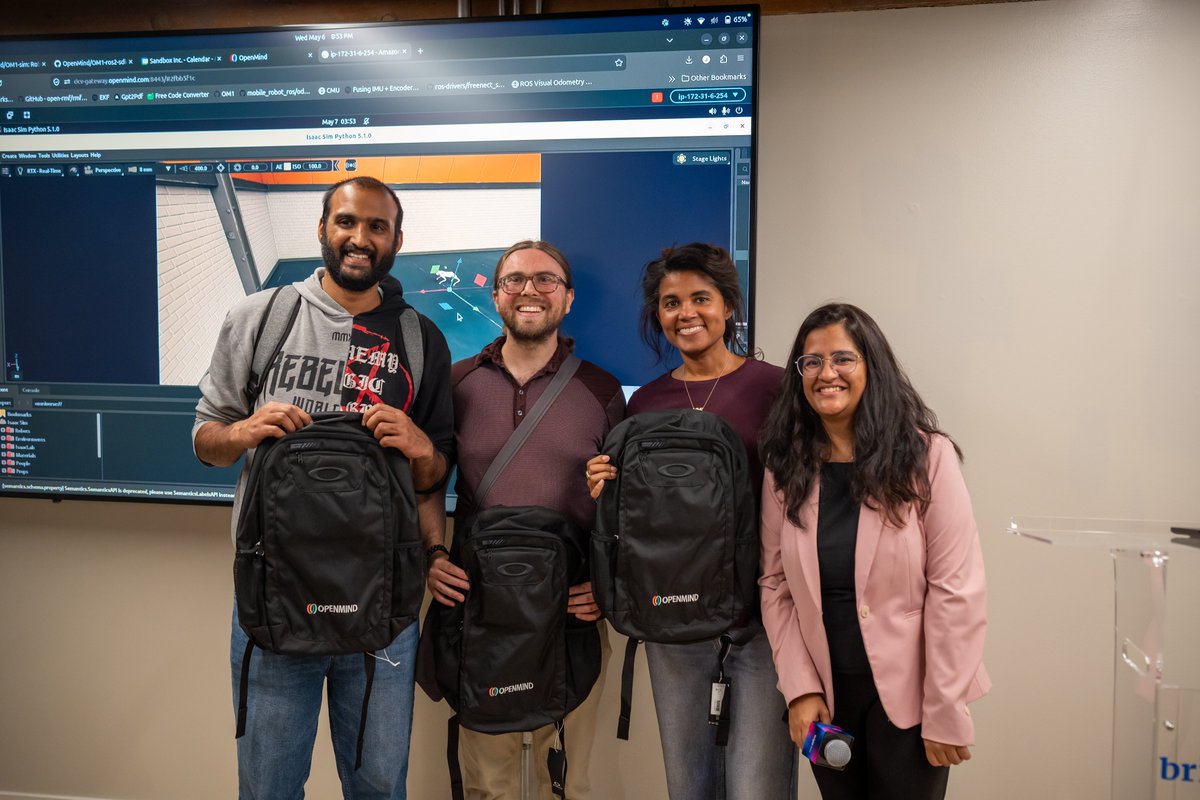
Our build night was a huge success! Thank you to all the technical teams for showing up and launching on OM1.
Winners received exclusive OpenMind backpacks and showcased their amazing demos including:
- Robot that mirrors human motion in real time
- New robot form-factor abstracted and automated in just 30 minutes
- Autonomous drones controlled in simulation by natural language
It will only get easier to build applications from here.
OpenMind OM1 Build Night w/ @OpenAI Codex
Location: San Francisco [Address given upon successful RSVP]
Date: Wednesday, May 6 @ 4:30 PM - 9:00 PM
This event is for robotics and agent developers, AI-native builders, technical founders, and curious engineers who want a practical way to learn OM1 by actually building with it.
Bring a laptop and come ready to ship something.
Register: https://t.co/QCQRDttXKF
All roboticists - in case you are building VLAs, please stop what you are doing, take a break, get a coffee, and read the LeWorldModel paper by @lucasmaes_, @randall_balestr, @ylecun and collaborators: https://t.co/3XlG5rFlCX. And then read it several more times - the same general approach can be directly mapped to other key problems in robotics, including dealing with multimodal inputs such as vision and speech
Bots, Bevs & Devs was a blast!
Huge thanks to everyone who came out to Circuit Launch in Oakland for an evening of robotics, AI demos, short talks, and great conversations.
OpenMind had the chance to demo our Unitree B2 robot dog running OM1, and it was awesome seeing people interact with the future of embodied intelligence up close.
OpenMind OM1 Build Night w/ @OpenAI Codex
Location: San Francisco [Address given upon successful RSVP]
Date: Wednesday, May 6 @ 4:30 PM - 9:00 PM
This event is for robotics and agent developers, AI-native builders, technical founders, and curious engineers who want a practical way to learn OM1 by actually building with it.
Bring a laptop and come ready to ship something.
Register: https://t.co/QCQRDttXKF





















![openmind_agi's tweet photo. OpenMind OM1 Build Night w/ @OpenAI Codex
Location: San Francisco [Address given upon successful RSVP]
Date: Wednesday, May 6 @ 4:30 PM - 9:00 PM
This event is for robotics and agent developers, AI-native builders, technical founders, and curious engineers who want a practical way to learn OM1 by actually building with it.
Bring a laptop and come ready to ship something.
Register: https://t.co/QCQRDttXKF](https://pbs.twimg.com/media/HHgCI7yaMAAOPAk.png)






























