Roboticist observing nature, making robots intelligent and interactable as any social animal. My interests include distributed robotics and multi-robot systems.
🚀 Excited to share that our team at #MISTLab and @polymtl will be featured on @CNN's Tech for Good! Our segment highlights our research on multi-robot autonomy for space exploration, where we showcased the autonomy modules of our heterogeneous robot swarm.
Engineers @GeorgiaTech have built #robots made of robots that are greater than the sum of their parts. On their own, "smarticles" can only flap their arms, but bundled together, they form a mobile supersmarticle that's driven by collective nudging.
📝: https://t.co/XkFPHeFTPK
Submitting to our Special Issue of Swarm Intelligence on Nano and Micro Swarm Robotics? Deadline is 31 Aug, but we'd love to hear about your intentions to submit as soon as possible. Just send me an email! Co-edited with @DoctorJosh, @xdcmu & @metin_sitti https://t.co/8b5jwrWUwj
Congratulations to now Dr. @Vivek3rd for successfully defending his PhD thesis on hierarchical #robot#swarms@MIST_lab@polymtl ! Vivek's thesis had an incredible breadth and was a massive experimental undertaking. I'm proud of his achievements!
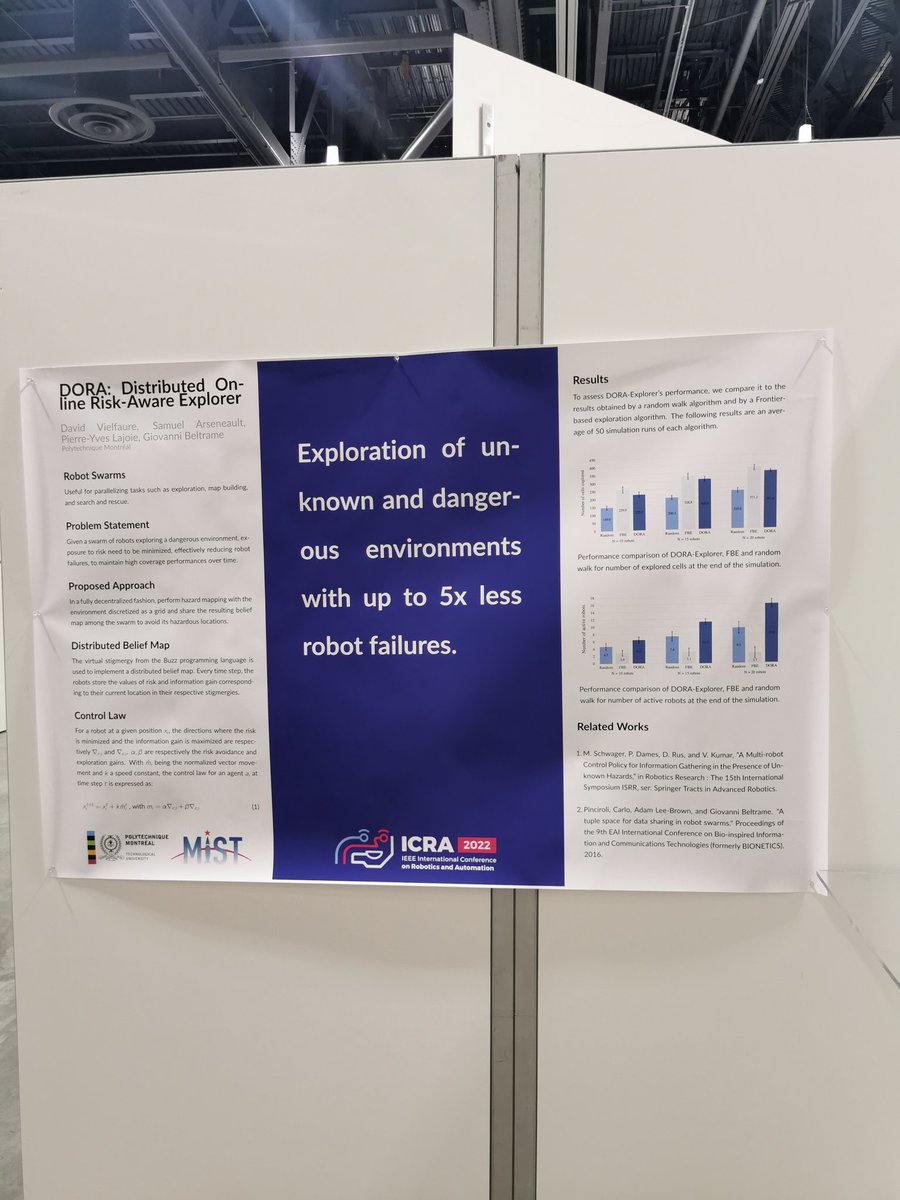
Come and see our spotlight on #multirobot risk-aware exploration algorithm DORA at #ICRA2022 in room 118C (Multi-Robot and Swarm Robotics II) and chat with us at the poster session!
Full paper: https://t.co/oixItt940m
And for @MIST_lab last presentation at #ICRA2022, we'll show our bouncy CogniFly by @ricarbotics et al. in Aerial Robotics V (in 112A, starting at 10:00). Come squeeze it at the poster session!
Full paper: https://t.co/7XhRWeoSFB
@ilpincy @jumpjoe78@MIST_lab@polymtl Thank you @ilpincy! I love this comment for some reason. I look forward to a collaborative research work with you in the future. I feel I could use your inputs and perspective in research.
Some truly remarkable images from Ingenuity, scouting the Entry-Descent and Landing hardware (parachute and back-shell) to inform future missions to Mars (i.e. Mars Sample Return).
A clear reminder that we can't land on Mars with only a parachute! #MarsHelicopter
A small group of #robots can guide thousands of simple particles (think nanomedicine!). The trick: the guide robots control the rules binding the particles together. Fantastic work by @Vivek3rd@SepandD@polymtl
Paper: https://t.co/zcNclfzFPj
Very proud of our partnership with @BostonDynamics and @NASAAmes. This video highlights the capabilities of our NeBula AI and Autonomy solution integrated with a multi-robot system, to autonomously explore, map, and find signs of life in Mars-analog caves https://t.co/SsTwcdraXw
Meet our new team member Spot from @BostonDynamics - help us name the robot and feel free to drop your suggestions below! Thank you @NSERC_CRSNG for supporting our research projects and allowing us to use state-of-the art hardware @polymtl
I invite the attendees of DARS to attend the online Session 2A1D: DARS online 3 which I will be chairing. There are some interesting papers that will be presented . @DARS2021 @swarm2021
Today we had our first test day at the @csa_asc ‘s Mars Yard in preparation for #IGLUNA2021. Here you see one of our rovers in the wild while it is autonomously navigating through obstacles on „#Mars“.
New @MIST_lab paper accepted on the @IEEEIoT Journal! In this work Y. Cao, C. Chen and @stongedav schedule ultra-wideband measurements for localization with 1000s of devices in highly-dynamic topologies. HW tested as usual!
Paper: https://t.co/WspzpB2eW3
Thread 👇 (1/5)
How do you explore a 3D, GPS-denied environment while maintaining connectivity with an operator? With a relay chain! Latest work on @ieeeras RA-L.
Paper: https://t.co/oGba34sew7
Video:
https://t.co/941zkYLTN3
Code:
https://t.co/4Pb2sSzrh5
@polymtl@MIST_lab@Vivek3rd#Robotics