Welcome to @axisrobotics in the Philippines 🇵🇭
A place where you complete daily tasks, contribute data on @base, and help build the future of Physical AI.
Massive thanks to @basepilipinas and @0xmoonlight_ for for hosting such a dynamic, insightful, and high-energy experience at the 14th BYCIT 🇵🇭
Over 500+ student participants experienced @axisrobotics firsthand - directly training Physical AI through our browser-based robotics platform on their laptops.
From teleoperating robotic tasks to contributing real-world data trajectories for robot learning, students got to experience how everyday users can actively participate in building the future of Robotics General Intelligence.
This is exactly what Axis is about: Making robotics data generation accessible, scalable, and community-driven. Proud to be the only robotics project at the event alongside the incredible @base PH ecosystem 📷 The future of Physical AI will not be built by a few labs alone - it will be contributed by everyone.
Comment which university in Phillipines you want Axis to be there 📷👇
Announcing our collaboration with @BitRobotNetwork!
Axis is launching SN/04 on BitRobot, the open robotics lab on Solana that coordinates distributed contributors to accelerate Physical AI research.
SN/04 is a teleop-in-sim mission where contributors complete web-based robotics simulation tasks, generate valuable training data, and earn rewards from both ecosystems.
Together, we’re scaling human demonstrations for Physical AI — powered by everyone.
Rules and details below ↓
The Filipino community continues to grow stronger every single day 🇵🇭
More builders, creators, and innovators are stepping into the future of Physical AI together with Axis Robotics. The energy, support, and engagement from the community have been incredible to witness.
This is only the beginning the Philippines is ready to become one of the strongest communities in the ecosystem 🚀
#AxisRobotics #AxisRoboticsPH #PhysicalAI
We validated the Axis data pipeline through model training in two ways:
- ACT/DP small-model benchmark: trained from scratch and evaluated on individual Axis tasks, showing that Axis-rendered data supports reliable single-task policy learning.
- Pi0.5 foundation-model training: pretrained on 82 Axis tasks and finetuned with LoRA in MuJoCo, showing strong generalization across target tasks.
This is a key step in our closed-loop data loop: using model performance to verify data quality and guide further optimization of the upstream data pipeline.
Details and demos below. ⬇️
Many tasks are now LIVE on the Axis Robotics Hub!
Complete the available tasks now and stay active before it’s too late 👌
Join here: https://t.co/kAEzDhjVIq
Stay engaged. Stay ahead. ⚡
#AxisRobotics#AxisRoboticsPH
Axis Weekly
This week, we focused on making the robotics data loop more measurable and reproducible: separating real user signals from bot traffic, expanding TaskGen into articulated-object tasks, and turning data-to-model workflows into repeatable services.
Key updates:
- Data quality: Task 805’s high failure rate was driven by bots, not real players.
- TaskGen: Codebase delivered for an upcoming update that will support end-to-end generation of articulated-object tasks from prompts.
- Simulation and data infra: Asset bugs fixed, and the automated recover-from-failure pipeline is nearing full deployment.
- Model training: Achieved a ~40% success rate in cross-simulation evaluation (IsaacLab to MuJoCo).
- Sim-to-real: Updated the domain randomization roadmap to heavily boost physical parameter diversity.
A closer look at this week’s progress 🧵
Congratulations to the 3 official winners of our Invite Contest in the Axis Robotics PH Community Telegram Group! 🚀
Your support, activity, and dedication helped grow our local Physical AI community stronger than ever. Thank you for being part of the movement and continuing to support Axis Robotics Philippines 🇵🇭
🏆 Winners:
✨ @trixxiespare
✨ @yeonapie
✨ @alizefanyaa
Once again, congratulations to all winners and thank you to everyone who participated! More community events and opportunities are coming soon. 🔥
#AxisRobotics #AxisRoboticsPH
🚀 AXIS ROBOTICS BOOSTING WEEK
🔥 OFFICIAL REFERRAL CONTEST
The Axis Robotics community is growing rapidly and now it’s your opportunity to be rewarded for helping expand the ecosystem.
Invite new members, climb the leaderboard, and earn exclusive community rewards during our official Boosting Week Referral Contest. ⚡
🏆 REWARDS
🥇 Top 3 Referrers
• Earn the Exclusive X Role
• Remember: Roles = Future Token Allocation Opportunities
🎁 Additional Rewards
• Top 7–10 Referrers — 20 IP each
• All Other Qualified Participants — 20 AP each
📌 HOW TO PARTICIPATE
1️⃣ Join our local Telegram community
https://t.co/xGWVT1HZc7
2️⃣ In the Telegram channel, type:
➡️ /Link
3️⃣ Receive your unique referral link
4️⃣ Invite new users using your referral link
⚠️ IMPORTANT REQUIREMENT
To maintain fair participation and avoid fake referrals or bots, all participants must have at least:
✅ 20 MIN. referrals recorded on Axis Hub
📅 WINNER VERIFICATION & CHECKING
🕙 May 24 — 10:00 PM (UTC +8)
All referrals will undergo manual verification before the official winners are announced.
Thank you for supporting the future of Physical AI with Axis Robotics. Good luck to all participants! 🔥
Been thinking a lot about how most people imagine robotics progress as one giant AI brain doing everything at once. But the more I read into what @axisrobotics is building, the more it feels like the real breakthrough is actually in the smaller details.
The idea of atomic skills makes so much sense. Humans don’t learn life in one shot either. We build from simple actions first, then stack them over time until they become second nature.
That’s why breaking robotic tasks into core actions like grasp, push, place, or pivot feels way more scalable than forcing one massive end to end model to figure out the entire world all at once.
What stands out to me is how this approach could make Physical AI more adaptable in real environments, not just controlled demos. If a robot can reuse skills, recover from mistakes, and understand actions as modular building blocks, that’s where things start becoming practical instead of just impressive.
Feels like the industry is slowly realizing that better structure and better data matter just as much as bigger models. Quietly, that might be the biggest insight here.
We are proud to announce that the Telegram community has officially reached 1,000 members.
This milestone reflects the strength, support, and dedication of everyone who continues to believe in the future of Physical AI and the vision we are building together.
To every community member who joined, engaged, and supported the movement thank you for being part of this journey. This is only the beginning, and we are excited for the next milestones ahead together.
The community keeps growing. The movement keeps getting stronger. 💪
#axisrobotics #axisroboticsph
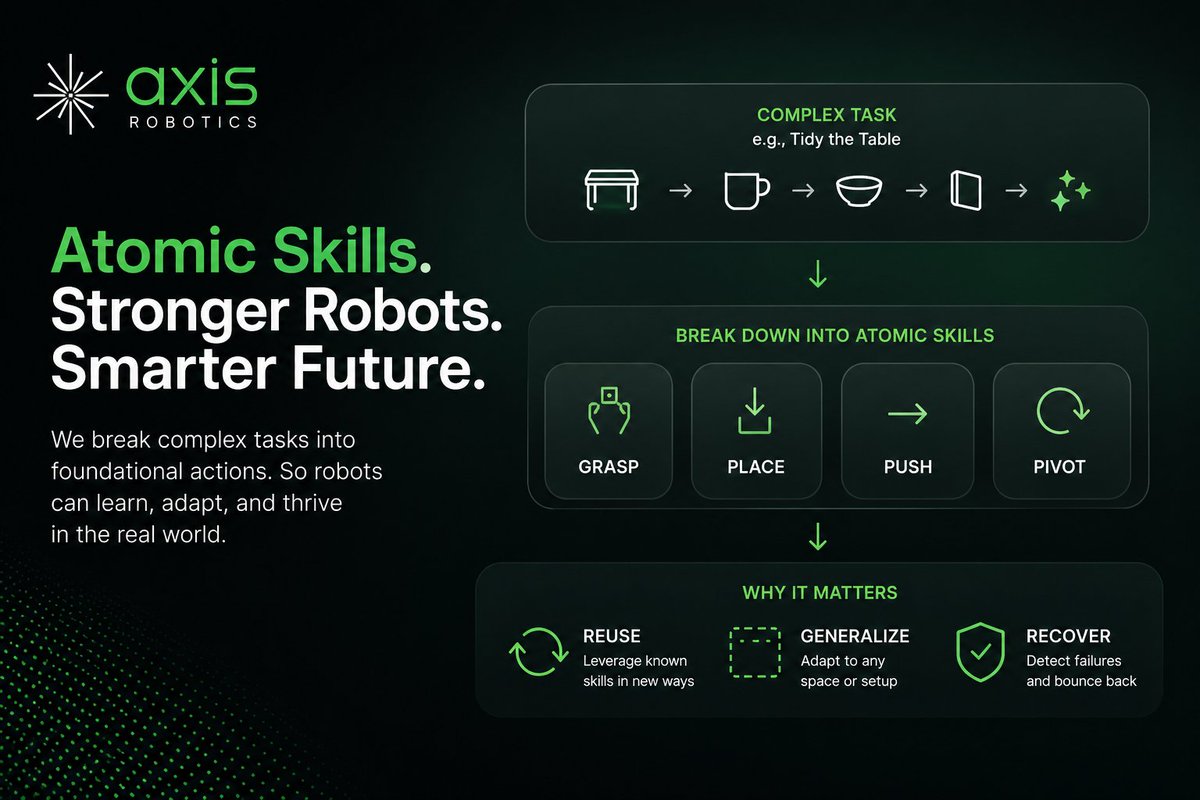
In our Task Package breakdown, we highlighted Dimension 2: Atomic Skills. But what exactly are they, and why are they critical?
While recent trends in robotic learning rely heavily on end-to-end models—trying to map raw camera pixels straight into complex movements in one giant leap—this method can be extremely data-hungry and brittle in complex, real-world environments.
The solution is architectural: deconstructing complex, long-horizon tasks into indivisible, foundational physical actions—like Grasp, Place, Push, or Pivot.
These are atomic skills. They successfully decouple high-level cognitive reasoning ("what to do") from low-level motor control ("how to move"). As demonstrated by research from Google DeepMind, scaling robotic intelligence fundamentally relies on dynamically composing a robust library of these base atomic skills. It establishes a shared, scalable conceptual structure for autonomous agents.
Training models on atomic skill sequences unlocks true generalization:
- Capability Reuse: A robot that already knows how to "Push" and "Grasp" doesn't relearn basic physics for a new task; it simply learns a new sequence.
- Spatial Generalization: Skills adapt to local geometry, working flawlessly no matter where an object sits in the workspace.
- Error Recovery: If a grasp fails, the system doesn't freeze. It recognizes the failure and triggers a recovery skill.
Raw, unsegmented teleoperation video suffers from a low signal-to-noise ratio. At Axis, our Dynamic Data Engine structures human intelligence into these exact atomic sequences, delivering the high-value building blocks foundation models need to achieve robust generalization.
Been watching @axisrobotics quietly level up behind the scenes lately. 🦾
The recent dev updates are actually pretty huge for the sim side — smarter caching to reduce MuJoCo scene-variant asset bloat, fixes for those annoying long-horizon gripper + IK issues, and now dual-arm controls are officially live.
A lot of people only notice the flashy demos, but this kind of backend optimization is what really pushes Physical AI forward. The foundation matters. 🚀
Feels like the team is building for scale, not just hype.
Congrats @imbananagreg #1 on the leaderboard! 🇵🇭💪
This achievement reflects the passion, consistency, and competitive spirit of our community. The grind never stops, and this is proof that the Philippines continues to lead with strength and dedication.
Let’s keep pushing, growing, and dominating together. 🔥
#axisrobotics #axisroboticsph
Static datasets are obsolete. At Axis Robotics, we are building a Living Data Engine for Physical AI where data and models continuously improve together.
• Failures become training opportunities
• AI validates data quality, not just quantity
• Simulation scales with human adaptability
Collect → Train → Fail → Recollect.
A smarter cycle for building the future of robotics.
#axisrobotics #axisroboticsph