Why is the bitter lesson debate on 3D necessary if you can learn 3D world models directly from 2D videos? Our CVPR 26 paper (presented Fri. morning in Findings track 1 #48, 7AM - 8:30AM) proposes the first 3D Gaussian Splatting dynamics model that predict multi-object collision dynamics, trained only from multi-view real-world 2D videos with a single GPU.
Foundational models trained on millions of videos can fail in strange ways when modeling those collision dynamics, yet our 3D world model can learn these collision dynamics and generate plausible trajectory autoregressively for dozens of frames, that can be rendered to any viewpoint via Gaussian splatting.
We release all the code and a dataset with 500 calibrated multi-view videos on two tasks: tabletop bowling and falling cubes, so that everyone can try training 3D world models (for predicting next-state dynamics) with a single GPU!
https://t.co/3ufAupwITa
🌟Your static 3D world models are now alive and interactable!
🚀Introducing NeuROK, a neural simulation framework that turns any static 3D object into an interactive 4D asset — no per-category physics, no physical annotations for training.
📄 https://t.co/PSAILjHmZb
🧵 1/n
Want to know more about our new elastodynamic contact simulator inside Genesis World?
See our #SIGGRAPH 2026 paper at https://t.co/PKaaCyObhL!
In 2020, IPC enabled penetration-free simulation using barrier functions, but it limited the efficiency.
Today, let's remove the barrier!
Congratulations to Siqiao ( @KnightNemo_ ) for releasing his NanoWorldModels repo.
World model research can be notoriously tricky, given the numerous small design decisions that can make an excellent idea appear to fail completely. Siqiao's repo will help all researchers avoid these pitfalls; a huge service to the community!
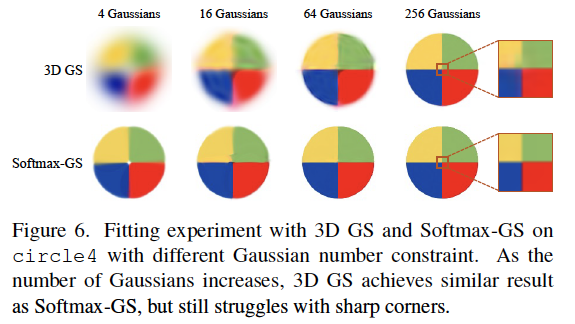
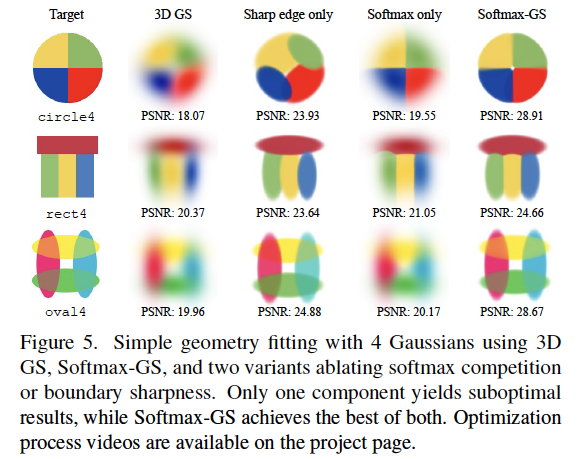
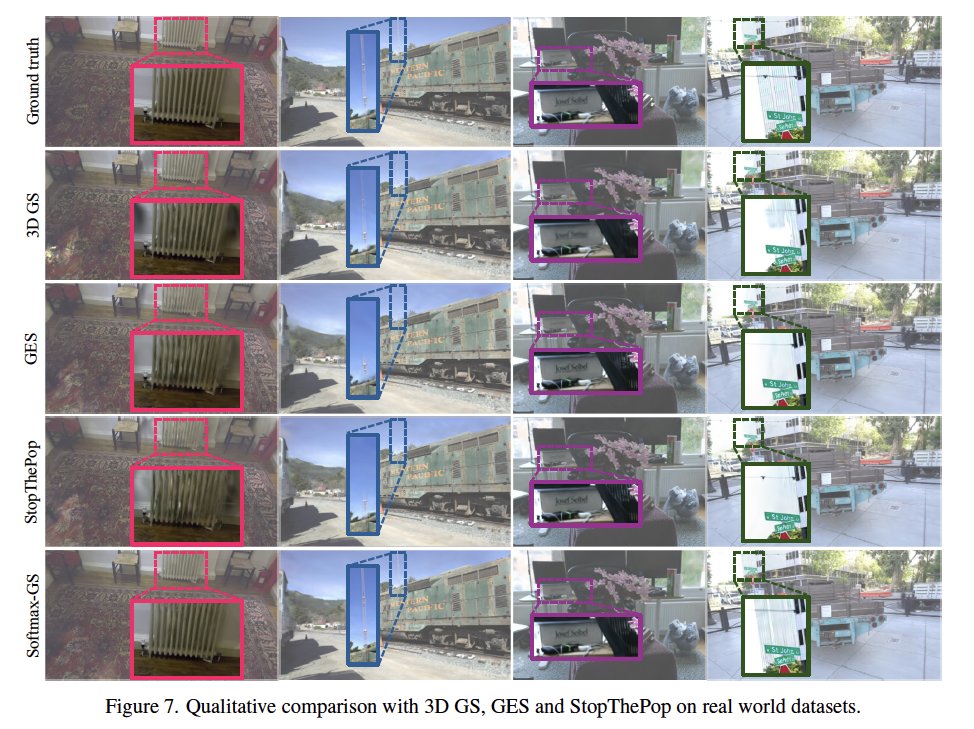
Did you know that Gaussian splatting always assumed that none of the Gaussians overlap, which is definitely not a correct assumption? Our CVPR 2026 (findings) effort Softmax-GS improves over the non-overlapping assumption in Gaussian splatting, and make multiple Gaussians compete in regions where they overlap using a softmax function, which greatly improves rendering performance when less Gaussians are used, as well as rendering consistency from different viewpoints. Especially, check out our experiments fitting multiple geometric shapes with only 4 Gaussians!
https://t.co/6kRHCSSFNh
Original UMI has an "obvious" problem 🧐: while the human feels haptic feedback during data collection, the robot policy doesn't!
Adding a $5,000, fragile, and bulky force sensor really defeats its "portable & scalable" goal
Luckily, we have @_Hojung_Choi and CoinFT!
Check out UMI-FT -- achieving finger-level force sensing and compliance control with two coin-sized F/T sensors 👇
3rd interstellar object discovered? Maybe. There's a lot of buzz right now in the Astro community. More observations should come in tonight to confirm if A11pI3Z is from beyond the solar system.