@Tomodovodoo Yeah that's been my experience with GPT 5.4 as well... It's overconfident 50% of the time, and the other 50% it overrefuses.
5.2 remains my preferred model for a bit, though 5.4 seems quite smart.
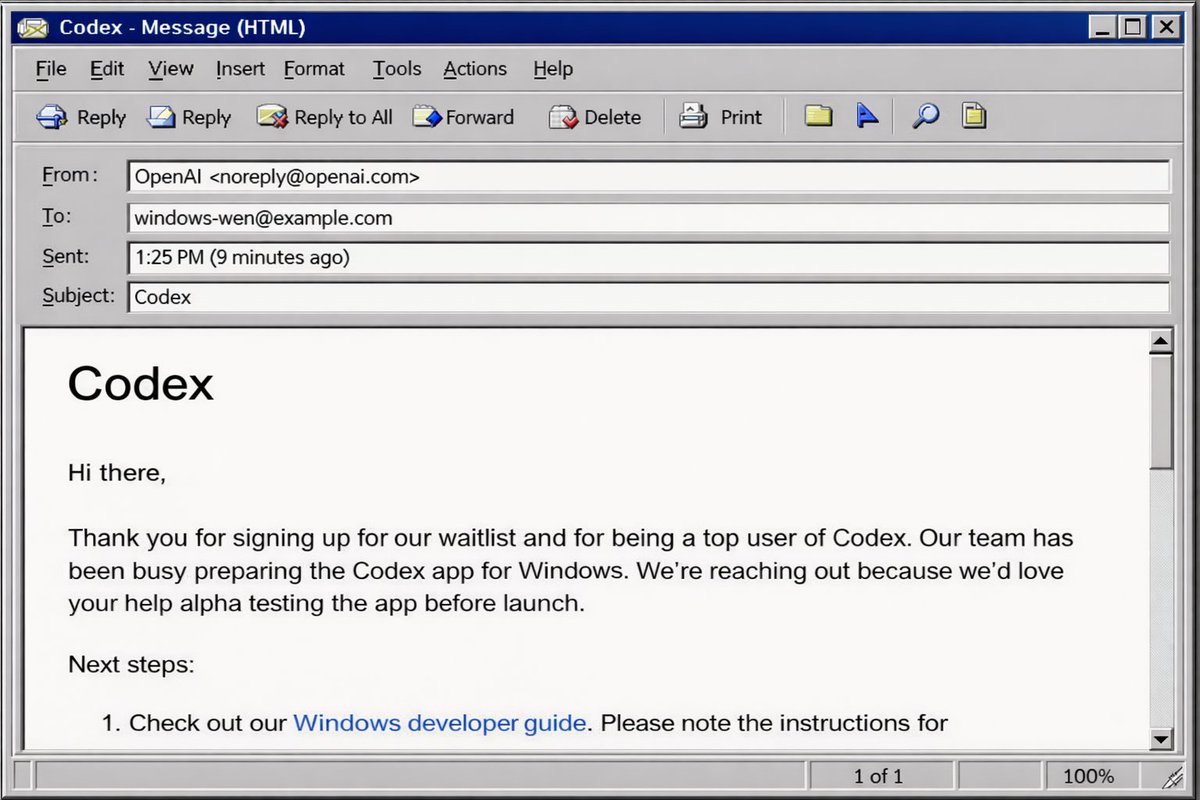
We have invited our first (small) batch from the waitlist to try the Codex app on windows.
Hope to quickly expand from there as we iterate quickly through feedback.
The first-ever Lean in Munich meetup took place this week at Google Munich. Missed it? Watch Sebastian Ullrich's full talk on Lean's foundations, applications in mathematics and software verification, and its growing role in AI-driven theorem proving
🎥 https://t.co/BzN4I5u5EE
Thanks to all the hosts, attendees, and especially to Christian Pfrang for organizing!
#leanlang #leanprover
Much thanks @littmath for the great blog post, and unexpected mention!
For anyone interested in (the future) of AI in math, I highly recommend reading this!
https://t.co/jyVDnVenT5
I've been keeping up and partially verifying community efforts, but I must say I haven't seen a lot of correct ones yet. I believe that @AcerFur has correctly solved Q3, and Q10? Q9 is widely solved by @Tomodovodoo
And best by @nasqret
Any more?
@stalkermustang Lots of individuals, some companies. Looked at a bunch of solutions, almost all nonsense, some I couldn’t easily evaluate. Some correct solutions to #9, including an impressive Lean formalization by @Tomodovodoo.
@davidmbudden@Tomodovodoo a fully justified argument under the weaker support condition.
From all of these, the most important!:
a rigorous lemma, or nonzero-polynomial construction, showing that for Zariski-generic cameras, each relevant 3n×27 block in each mode has rank 4/spans the 4D column space of C
@davidmbudden@Tomodovodoo Lemma 10: assumes lambda is in (R*)^(n×n×n×n) (i.e., every entry nonzero), which is stronger than the problem’s hypothesis (only non-identical quadruples forced nonzero), and several “absorbing constants/comparing decompositions” steps are presented as a sketch rather than...