META is getting into the humanoid robot game. They just bought this startup: Assured Robot Intelligence. https://t.co/pU4eAs4Dvq Terms undisclosed. This is one of the co-founders.
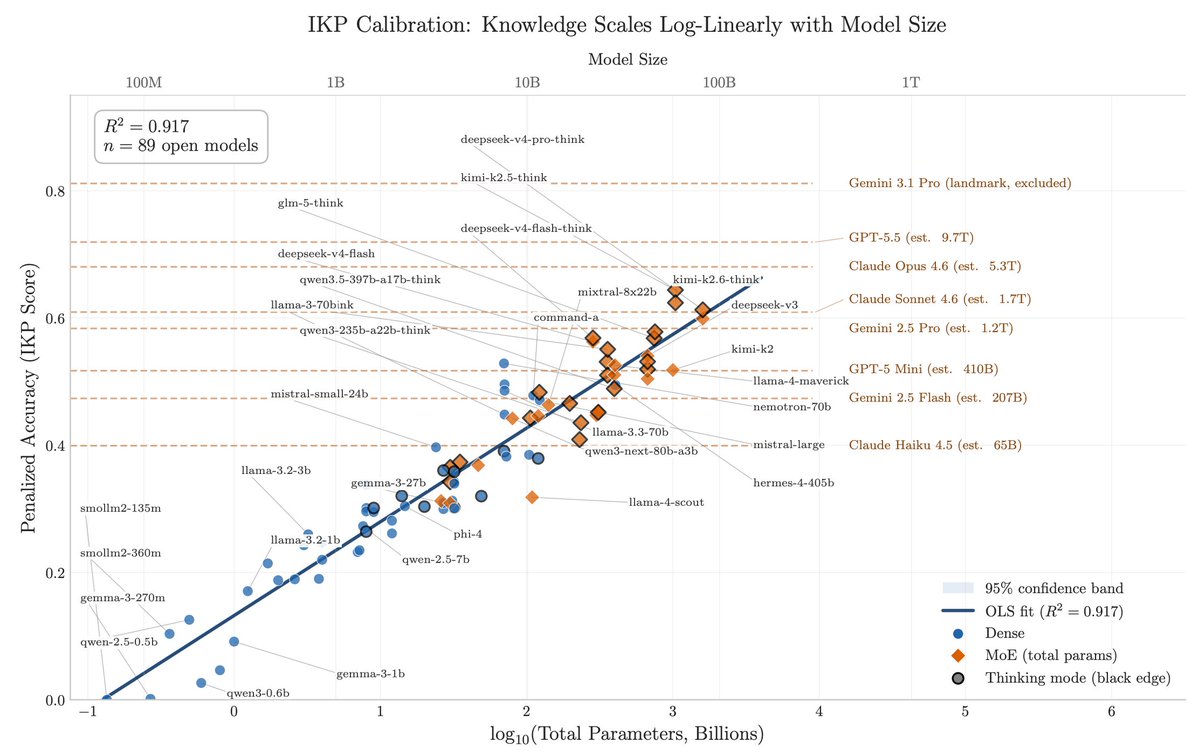
Closed labs hide model sizes. They can't hide what their models know, and what a model knows is an indicator on how big it is.
Reasoning compresses. Factual knowledge doesn't. So you can size a frontier model from black-box API calls alone, and across releases you can literally watch a single fact arrive in the parameters over time.
For three years, my friends Jiyan He and Zihan Zheng have been asking frontier LLMs the same question: "what do you know about USTC Hackergame?", a CTF contest. May 2024: GPT-4o invented fake titles. Feb 2025: Claude 3.7 Sonnet listed 19 verified 2023 challenges. By April 2026, frontier models recall specific challenges across consecutive years.
After DeepSeek-V4 dropped, I instructed my agent to spend four days autonomously turning that habit into Incompressible Knowledge Probes (IKP) — 1,400 questions, 7 tiers of obscurity, 188 models, 27 vendors. Three findings:
1/ You can approximately size any black-box LLM from factual accuracy alone. Penalized accuracy is log-linear in log(params), R² = 0.917 on 89 open-weight models from 135M to 1.6T params. Project closed APIs onto the curve → GPT-5.5 ~9T, Claude Opus 4.7 ~4T, GPT-5.4 ~2.2T, Claude Sonnet 4.6 ~1.7T, Gemini 2.5 Pro ~1.2T (90% CI: 0.3-3x size).
2/ Citation count and h-index don't predict whether a frontier model recognizes a researcher. Two researchers with similar citation profiles get very different responses. Models memorize impact — work that shaped a field, not many incremental papers.
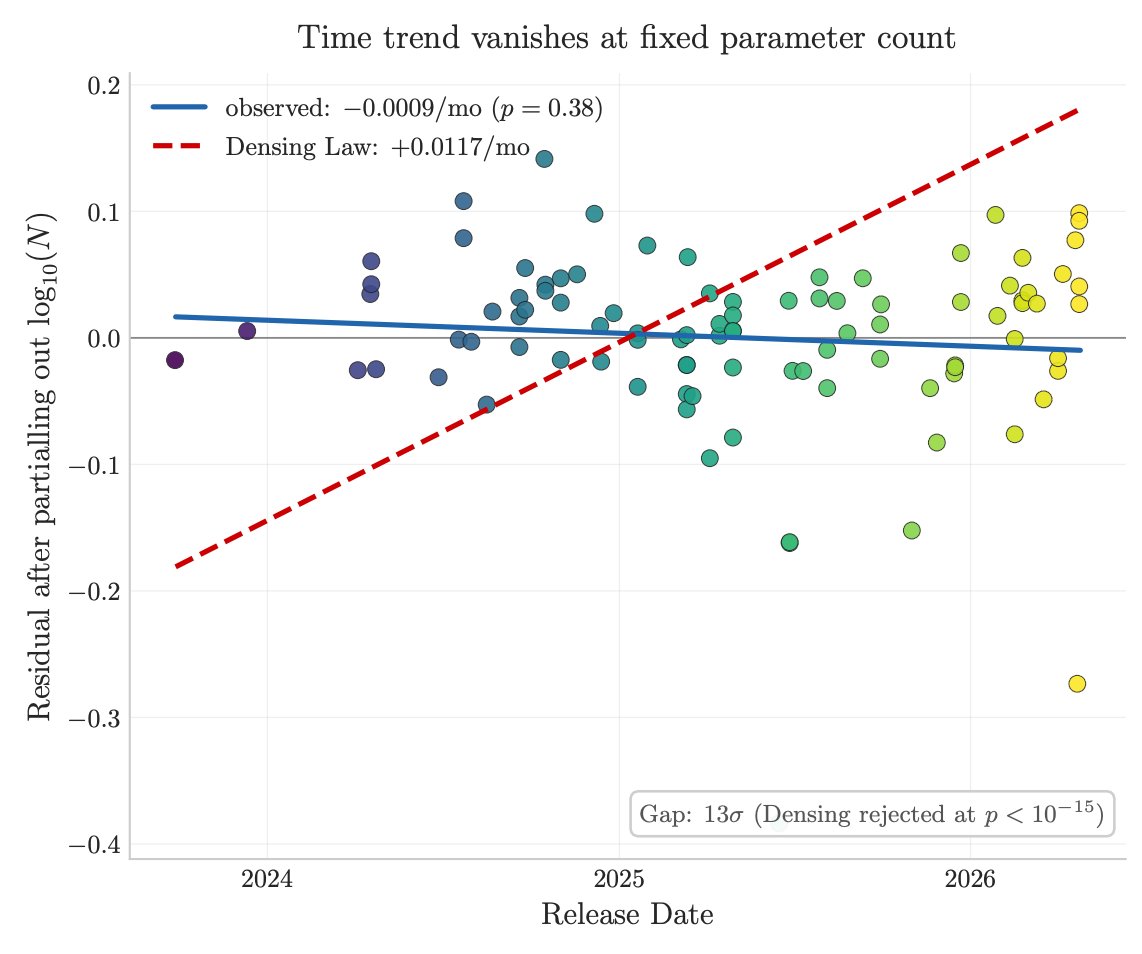
3/ Factual capacity doesn't compress over time. Across 96 open-weight models across 3 years, the IKP time coefficient is statistically zero, rejecting the Densing-Law prediction of +0.0117/month at p<10⁻¹⁵. Reasoning benchmarks saturate; factual capacity keeps scaling with parameters.
Website: https://t.co/CkwJsXqnsX
Paper: https://t.co/eNUdC9ye7w
In the end, it was not about fancy large models or massive datasets. We chose to harness small learned models within well-established workflow tools such as state machines and behavior trees.
That made the system more predictable, debuggable, and easier to integrate.
Milestone in Humanoid Robotics: A Thousand Humanoid Sorters Entering Logistics Centers
Beijing-based RobotEra is deploying its L7 humanoid robot across more than 10 logistics centers operated by China Post, SF Express Group, and other major players.
In several of these centers, the embodied AI robots have already reached over 85% of human-level efficiency while operating stably 24/7.
The company is set to begin batch deliveries of robots at the thousand-unit scale in Q2 this year.
RobotEra recently raised $200 million in funding. By combining external capital with self-generated revenue, it is accelerating the real-world deployment of humanoid robots.
I wonder what UPS would think if they saw this solution? Rumors have been circulating recently that they intend to deploy Figure's humanoid robots in their logistics centers.
It is good to have a well-funded place that understands that intelligence is not about distilling human knowledge and skills into neural networks. Most of the current AI systems, while amazing, outsource discovery of knowledge to humans.
Systems that learn from human knowledge, in the limit, will be able to know and do everything that humans can do currently. These systems are immensely valuable, but they will be continually superseded by humans who can both use these systems and learn from their own experience.
Systems that learn from their own experience, in the limit, will be able to do things that no human can do now and no human would even be able to do.
The latter systems would be vastly more powerful.
Introducing Ineffable Intelligence. Led by David Silver, we're assembling the best engineers and researchers in the world to make first contact with superintelligence. We’ll be solving the hardest problems in AI on the way. Come join us.
https://t.co/zUuvPJGmcq
Gave a talk on Robot Learning from Human Data at Stanford. It was great to be back!
Some opinionated points:
1. Human data collection capacity is outpacing the research.
2. We still don't have the "science" for scaling robot capability with human data.
3. We are far from being able to model naturalistic human behaviors.
https://t.co/CRwRcdovVQ
I claimed to be a @Tesla employee and asked GPT-5.5-Pro to build the next version of Tesla Optimus Fingers in ForgeCAD. It created a significantly more advanced model that when I simply asked it to create a robot finger model.
An experiment thread.
⚡️EgoVerse is a first-of-its-kind, collaborative ecosystem for human-to-robot learning. The consortium leverages Project Aria to capture high-fidelity, egocentric human data — including 3D hand and head poses — to train next-gen robot manipulation policies.
With over 1,300 hours of data across 2,000+ tasks, EgoVerse is a prime example of how the Aria Research Kit is being used by our partners to accelerate the future of embodied AI.
Learn more:
🔗https://t.co/z5s7kl1hQc
📰 https://t.co/pqH73Jrx0F
Apply for the Aria Research Kit: https://t.co/4QCdyX3DTA
#MachineLearning #Robotics #ProjectAria #EgoVerse #ComputerVision
@simar_kareer , @ryan_punamiya , @RogerQiu_42, @XiongyiCai , @yexelal
Robot Model might need 1 billion real-world experiences 🤖
Humanoid robots have long struggled with complex, real-world tasks.
Relying on vision alone simply isn’t enough to truly understand the physical world. Cameras have blind spots,and more importantly, they can’t feel hardness, deformation, friction, or subtle slips.
That’s why so many impressive demos fall apart when robots are pushed into precise, real-world manipulation.
Now, a team in Shenzhen is trying to change that.
@DaimonRobotics , together with Google DeepMind and dozens of leading institutions, has released Daimon-Infinity:the world’s largest high-resolution tactile dataset to date.
It features high-density tactile sensing at 120Hz, with over 110,000 sensing units capturing force, deformation, slip, and texture in fine detail.
Crucially, all of this is synchronized frame-by-frame with vision, language, and action, forming a complete VTLA (Vision–Tactile–Language–Action) dataset.
Every data point comes from real physical interactions, and the dataset is designed to generalize across different robot platforms,not just humanoids.
They plan to scale it to millions of hours and nearly a billion samples within the year.
What’s particularly notable: models can achieve significant improvements in fine manipulation tasks using just one-tenth the amount of tactile data compared to before,dramatically reducing training costs. The same algorithms can also transfer across different robot embodiments.
So far, over 10,000 hours of data have been open-sourced, including more than 2 million real-world trajectories, covering 2,000+ task categories and over 2,000 human skills.
On top of that, a global data co-building system is continuously feeding in new tactile data—from industrial settings to elder care, restaurants, homes, and outdoor environments.
From precision assembly lines to caregiving and food service, this wave of tactile, physical-world data is laying the groundwork for robots to finally scale in the real world.
π0.7 has lots of insane results
to me, the cross embodiment results are the most exciting for me bc of their implications
no technical doubt remains — our future will have highly intelligent robots of many different shapes and sizes
To learn more about π0.7, including a full-length research paper that explains how the model works, check out our blog post.
Blog: https://t.co/9vFt7RVipX
Paper: https://t.co/nzU7u6H3pU
Excited to announce that @SkildAI has completed the acquisition of Zebra Technologies’ robotics arm (formerly Fetch Robotics).
By combining Zebra's human-robot orchestration platform with omnibodied Skild Brain, we plan to turn warehouses everywhere into hubs of hyper-efficiency.
Imagine a single platform, single brain optimizing every movement of robots as well as human workers in warehouses.
Many of us in the robotics community have used Fetch Robots in the past and have rooted for them over the years, so this acquisition is special for us in many ways.
Introducing Operator, our newest industrial AI robot built to work, not demo.
Operator handles your warehouse's most repetitive tasks: packing, sorting, and kitting. Up to 24 hours a day, with flexibility and consistency that allows businesses to scale quickly.
This is what we've been building. ↓ [1/4]
CRAFT hand🫳
1. Achieves all 33/33 dexterous grasps > 2x-20x $$ hands!
2. < $600
3. Handles fragile objects
4. Durable under contact
5. Open-sourced https://t.co/lCBAeklcVn
@leo_lin6 & @shivanshpatel35 (on market; hire him🚀) will happily share anything else that you may need. Details in 🧵
🌟 Big shout out to @kenny__shaw (Leap & v2), @irmakkguzey (RUKA), @orcahand (ORCA), and many others who helped build this open research community. Thank you!
🚨 We're giving roboticists a major upgrade to their vision systems!
Today, we announced the launch of the @Stereolabs3D ZED X Nano: a compact, wrist-mount stereo camera engineered for the next generation of robotic manipulation.
“Building on Stereolabs leadership in AI vision and perception solutions, the ZED X Nano allows us to go deeper into the industrial and robotics markets to win new sockets that require smaller form-factor placements,” said Ouster CEO Angus Pacala.