Open-source magnetic tactile sensor for $5! 🧲
Researchers introduced a magnetic tactile sensor that's low-cost, and easy to fabricate, democratizing tactile sensing for robotics.
Operating in unstructured environments like homes and offices requires robots to sense forces during physical interaction. Yet the lack of a versatile, accessible tactile sensor has led to fragmented solutions and often force-unaware, sensorless approaches.
Building an eFlesh sensor requires four components: a hobbyist 3D printer, off-the-shelf magnets (less than $5), a CAD model, and a magnetometer circuit board.
The sensor is 3D printed with magnets embedded in the middle layer. Based on chosen mechanical properties, magnets displace in response to contact forces, measured by a magnetometer underneath.
An open-source design tool converts simple OBJ/STL files into 3D-printable STLs. This enables application-specific sensors for robot hands, grippers, quadruped feet, and more.
Slip detection generalizes to unseen objects with 95% accuracy. Visual-tactile control policies improve manipulation by 40% over vision-only baselines, achieving 90% success on precise tasks like plug insertion and credit card swiping.
All design files, code, trained models, and conversion tools are openly available.
Project page: https://t.co/gTHpcnja5B
~~
♻️ Join the weekly robotics newsletter, and never miss any news → https://t.co/GoA3ZuwoPB
Join us for next MorphoTalks with Professor Thomas Gorochowski @chofski (University of Bristol - England 🇬🇧) for a deep dive into programming biological systems on 25 February 2026 .
With Kieran Nazareth and @MorphComp#Robotics#Robot#SoftRobotics
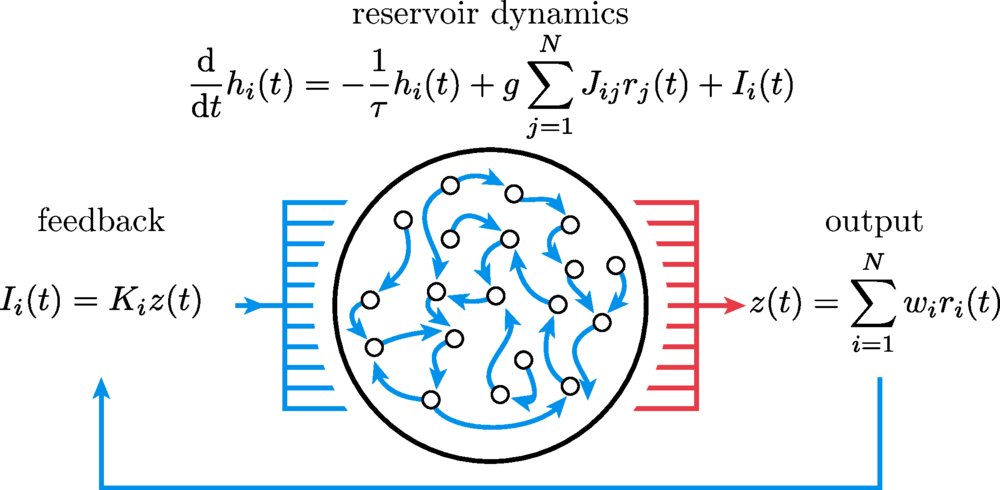
Fundamental limits of reservoir computing: stability vs. reach
Reservoir computing (RC) uses the natural dynamics of a large recurrent network to generate time-varying signals. You only train a simple readout, not the whole network, which makes RC appealing both for neuroscience models and for physical implementations (photonic chips, mechanical oscillators, cultured neurons). Yet RC often behaves unpredictably: sometimes it learns a target sequence easily, sometimes it cannot hold the pattern or never gets close.
Daoyuan Qian and Ila Fiete show that these failures come from two distinct causes. First is stability—the network must have a feedback-stabilized orbit that actually sustains the target output. If the orbit is unstable, the network can match the target during training but drifts away as soon as training stops. Second is reach—even if a stable orbit exists, the learning rule must be able to steer the system close enough to it. FORCE learning generally has greater reach than teacher-forcing, and adding controlled “forgetting” can improve reach further.
The key insight is that stability and reach are separate. Increasing reservoir size helps reach (more expressive dynamics), but also makes stability harder (more modes near instability). Simply scaling up a network is not always better. Designing reservoirs with multiple neuron types can improve this trade-off—retaining expressive power while keeping the dynamics stable.
The result is a clearer, more practical view of how to design and train reservoir systems. If the target lies outside the stability region, change the reservoir. If it lies inside but training stalls, change the learning rule. This framework connects engineered RC systems with ideas from neural dynamics in the brain, where biological circuits must also balance flexibility with stability.
Paper: https://t.co/mp6Y11MTRk
@LindauWest @Procreate Thank you, Linda! We work on bio-inspired and growing robots, although not in the style as depicted. The drawing is mostly for fun.
🚨 Hiring! We are looking for a postdoc researcher with expertise in computational fluid dynamics and structural simulations to investigate the biomechanical and mechanosensory basis of insect flight.
Extreme agility ✅
Morphological computing✅
Meshes!✅
https://t.co/IEpcWjOFDA
Join us at the first global competition in Physical Reservoir Computing #PHRESCO!
Everyone can join and it's free!
Click on the link below – Expression of Interest Deadline 23:59 (GMT) on 31st August 2025!
https://t.co/KsecMYMLN4
@phresco_comp#PhysicalReservoirComputing
Humanoid robots look incredible—but they have a hidden design flaw.
In my The Conversation article, I explain why efficiency is a challenge and how Mechanical Intelligence could change the game.
🔗 https://t.co/NZXw01kUg5
#Robotics#AI#Engineering#MechanicalIntelligence