WE WANT YOU. ON STAGE. 🎤
2026.04.25 | Changsha, China
#openEuler Developer Day 2026
We're looking for the boldest technical speeches, posters, and demos to feature live at our annual gathering.
✨ If you're ready to participate in person, DM us to get involved.
Environment ready? Workflow mastered?
Now it's time to teach your AI agents how IB-Robot works.
In this tutorial, you'll learn how to enable IB-Robot's built-in AI agent skills, helping AI tools understand your project structure and development workflow.
Dive in 👇
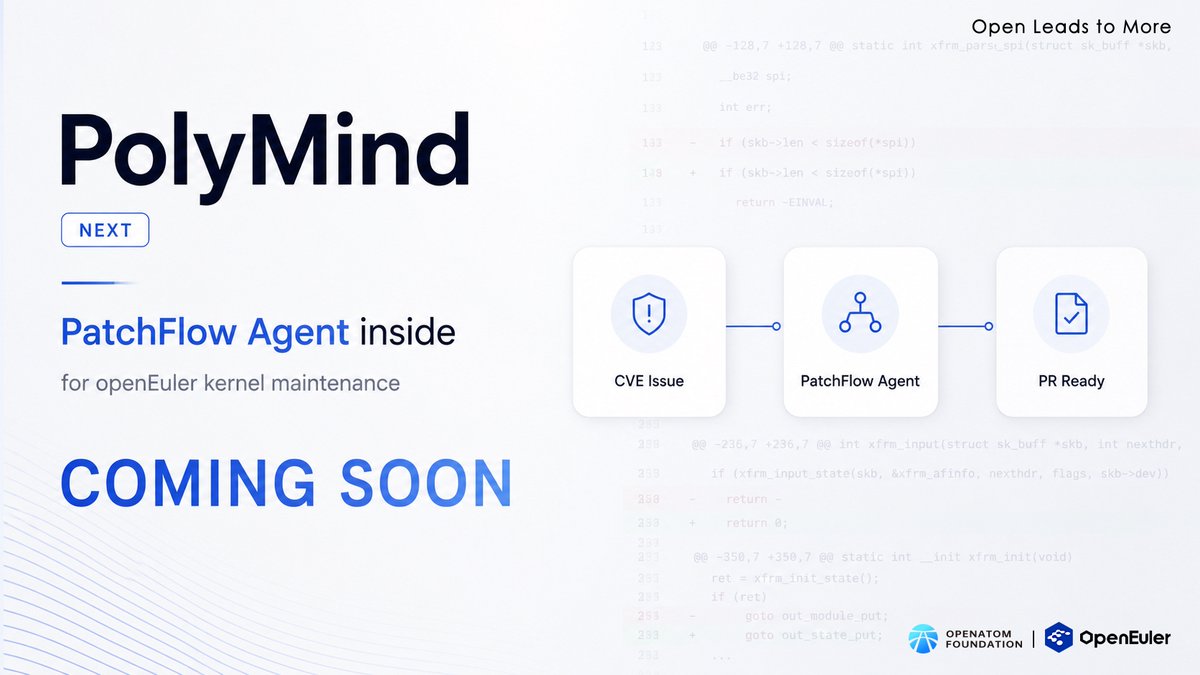
PatchFlow Agent is already handling real vulnerability maintenance in openEuler.
✅Finding patches.
✅Analyzing branches.
✅Backporting changes.
✅Creating PRs.
The next step?
Bringing AI agents closer to developers.
PolyMind. Next generation. Coming this June.
Environment ready? Time to start building.
In this IB-Robot tutorial, we walk through the daily development workflow: load → configure → build.
Follow the tutorial and get ready for the next step in the IB-Robot journey.
Cloned IB-Robot… now what?
Get started with our first-time setup guide — just one script and you're ready for simulation, training, and real robots.
Dive in and start your IB-Robot journey here 👇
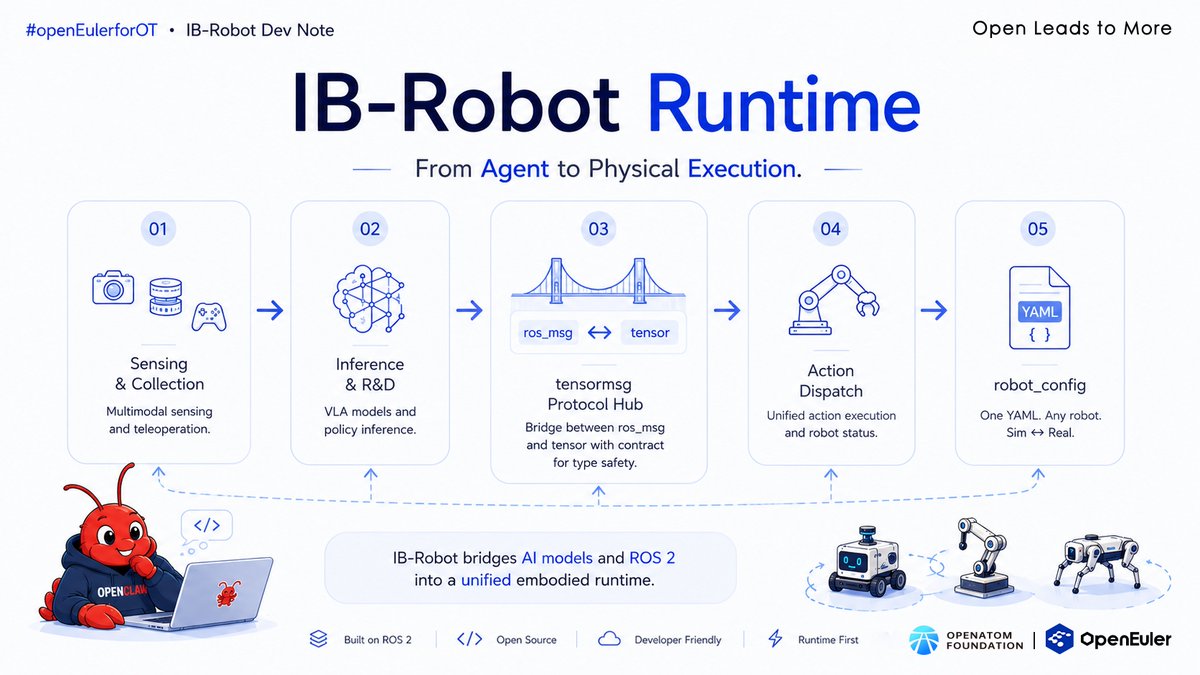
AI policies can output actions.
Real robots still need a runtime.
IB-Robot on openEuler Embedded connects AI workflows with ROS 2 runtime paths: contracts, robot_config, action_dispatch, simulation, and real hardware demos.
Watch the 59s walkthrough ↓
robot_config bridges sim ↔ real.
Define joints, controller modes, and sensor extrinsics in a single YAML configuration,
with one-click switching between simulation and real-world deployment.
OpenClaw gives robots an AI-native interface.
IB-Robot turns that interface into real-world execution.
From natural language interaction
to ROS 2 actions, VLA inference, and physical robot motion.
👉https://t.co/2ZClHibcDl
1/ Your policy runs.
Your robot still doesn’t.
Between a trained robot policy and a working ROS 2 system, there’s a lot of runtime glue: data formats, timing, control paths, deployment structure.
That's the gap IB-Robot is trying to reduce.
5/ Fourth gap: deployment.
A Python script can prove the idea.
But a robot system needs ROS 2 nodes, launch files, configs, and runtime structure.
IB-Robot maps:
scripts → ROS 2 nodes
through robot_config.