Excited to share our paper “MOBIUS: A Multi-Modal Bipedal Robot that can Walk, Crawl, Climb, and Roll” has been accepted to RSS 2026 in Sydney!
MOBIUS opens many research directions in loco-manipulation, force control, and multi-modal optimization.
https://t.co/NkhZj4lbrg
Attending ICRA 2026 to present, “Safe Whole-Body Loco-Manipulation via Combined Model and Learning-based Control” (with Yeping Wang and Stefano Di Cairano) on Tuesday, 15:00–16:30, Paper TuI2I.117.
Paper: https://t.co/uikeCPq862
Video: https://t.co/sImsM2UUUu
Excited to share our paper “MOBIUS: A Multi-Modal Bipedal Robot that can Walk, Crawl, Climb, and Roll” has been accepted to RSS 2026 in Sydney!
MOBIUS opens many research directions in loco-manipulation, force control, and multi-modal optimization.
https://t.co/NkhZj4lbrg
#RSS2026 Call for Papers ✨
Workshop on Whole-Body Control & Bimanual Manipulation: Applications in Humanoids & Beyond
Share your latest work by Jun 8 &
Join us with our amazing lineup of speakers from academia & industry!
https://t.co/b4IJHK2hFb
@RoboticsSciSys
Happy to share our latest ICRA 2026 work on Safe Whole-Body Loco-Manipulation for Human-Robot Collaboration 😃
paper: https://t.co/uikeCPq862
video: https://t.co/sImsM2UUUu
Looking forward to presenting it in Vienna, Austria, June 1st - 5th.
New cities, new horizons. 📍 Boston & Sacramento, we’re here to lay the groundwork for our autonomous ride-hailing service. The future of mobility just got a little bigger.
Learn more: https://t.co/FpAUnlDkCm
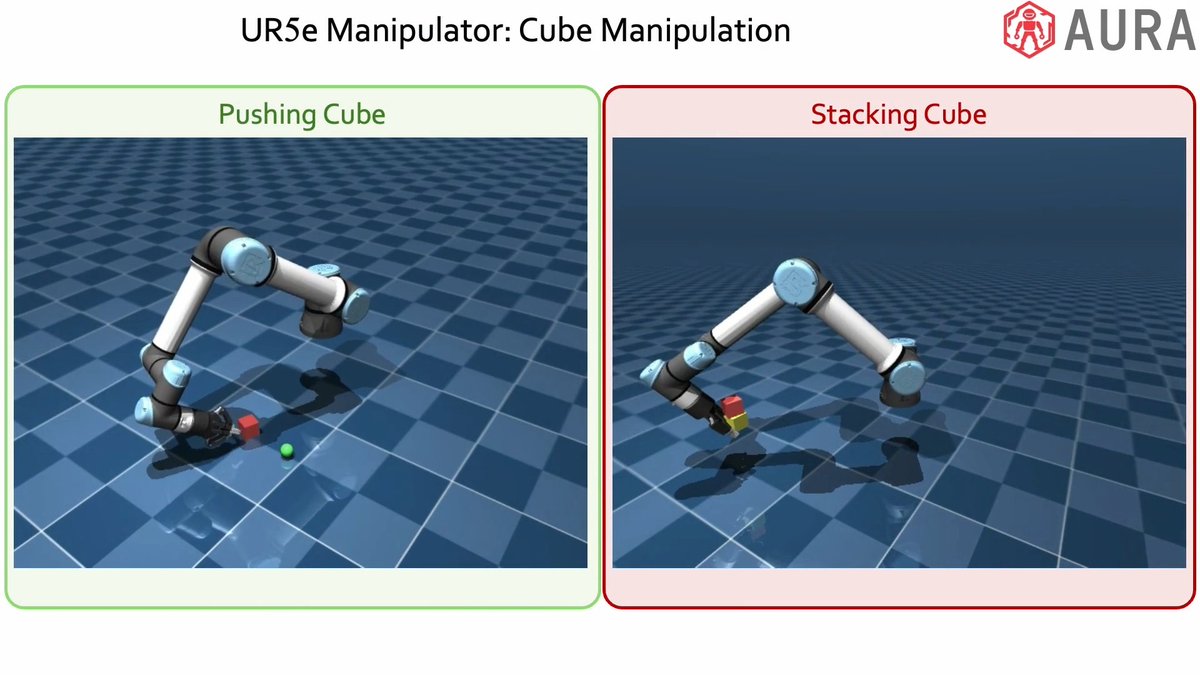
🚀 AURA (Autonomous Upskilling with Retrieval-Augmented Agents) is accepted to ICRA 2026! 🦾
LLMs + RAG + static schemas to autonomously generate full RL curricula (rewards, randomization, hyperparameters) for embodied robot learning.
Website: https://t.co/S4B8cV5uuW
Our paper was accepted to #ICRA, and I get to visit my home country of Austria! Looking forward to sharing the paper once we make it available next month, it’s on Safe Whole-Body Force Control for Loco-Manipulation ☺️.
The table-to-dishwasher task is the classic nightmare scenario for roboticists:
Long-horizon, highly dexterous, precise, whole-body manipulation combined with delicate, transparent, reflective, and deformable objects.
Yet Memo handles it so naturally and elegantly.
Wrapped up my IROS 2025 presentation! Thanks to those that joined, and if you missed it and are interested in legged locomotion, see paper here: https://t.co/2fF4p0Jk12
Grippers are one of the most intricate parts of a humanoid robot: packed with actuation and sensing, durable enough to handle tough jobs and precise enough to handle fragile items. Our engineers share the Atlas gripper's evolution and design principles.
Excited to share our next work from @merl_news, Energy-Efficient Motion Planner for Legged Robots, accepted to @IROS2025! See https://t.co/2fF4p0Jk12 and https://t.co/F9NAf6HZUu. Looking forward to seeing you in Hangzhou, China (October 19-25)!