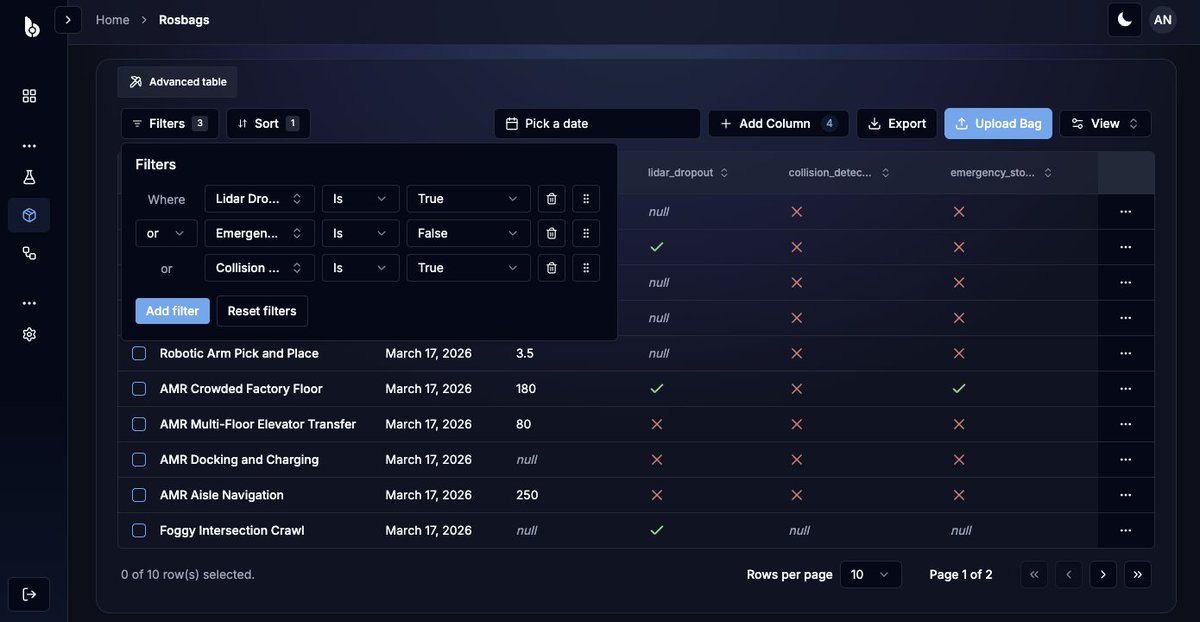
Searching through raw ROS bags is dead. 🛑
If you want faster dev cycles, basic search won't cut it anymore. The new standard for rosbag pipelines:
🔍 Condition-based filtering
🏷️ Combine metadata, tags & attributes
⚡️ Instant data pinpointing
#ROS2#Robotics#DataOps
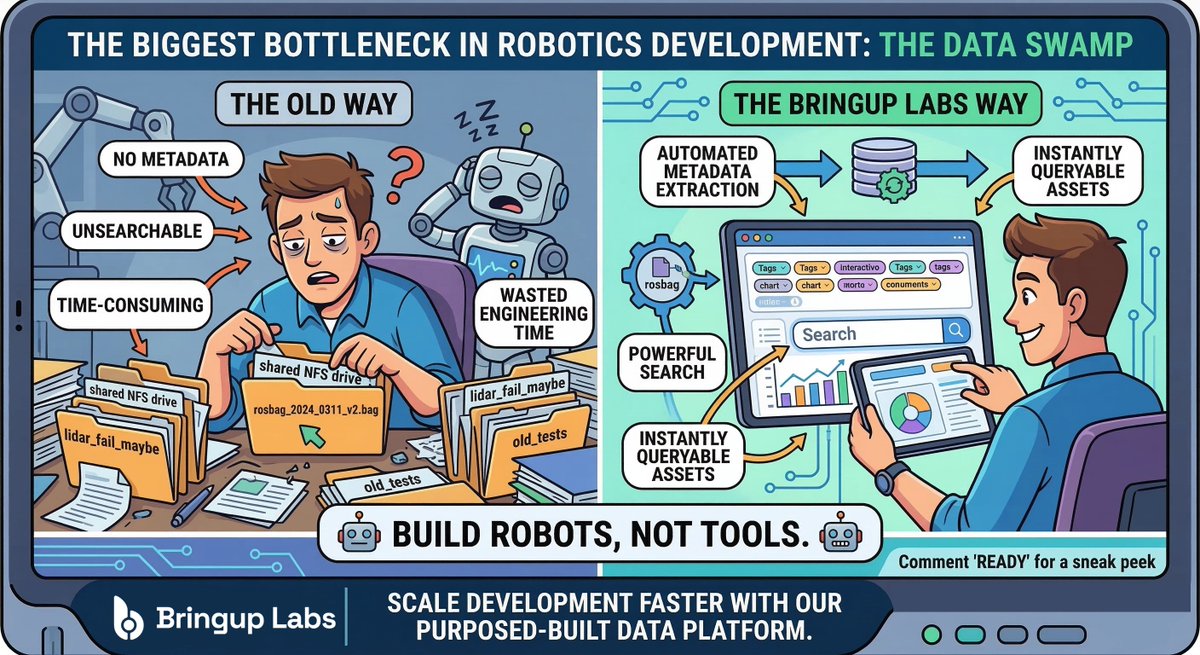
The most expensive thing in your lab isn’t the LiDAR.
It’s the 4 hours your lead engineer just spent searching an NFS drive for a 50GB rosbag.
At BringUp Labs, we’re building a solution to stop this data leak—so teams can get back to engineering.
#Robotics#ROS2