Inspired by change, inspiring change. I love life, my wife & 3 kids, the things I'm working on to leave a better future for them, and the people I work with.
Some designs divide opinions.
Some people see beauty.
Some see controversy.
Some see something they would never want to drive.
But that is exactly the point.
In mobility, design will always be subjective. Driver evaluation should not be.
At @Mettis_AI, we are building technology to make driver evaluation objective, data-driven and scalable, using computer vision and AI to understand real driving behaviour.
Not opinions.
Not impressions.
Not “I think you drove well.”
Real data. Real behaviour. Real insights.
The design may be controversial.
The driving data is not.
Mettis AI makes driver evaluation 100% objective.
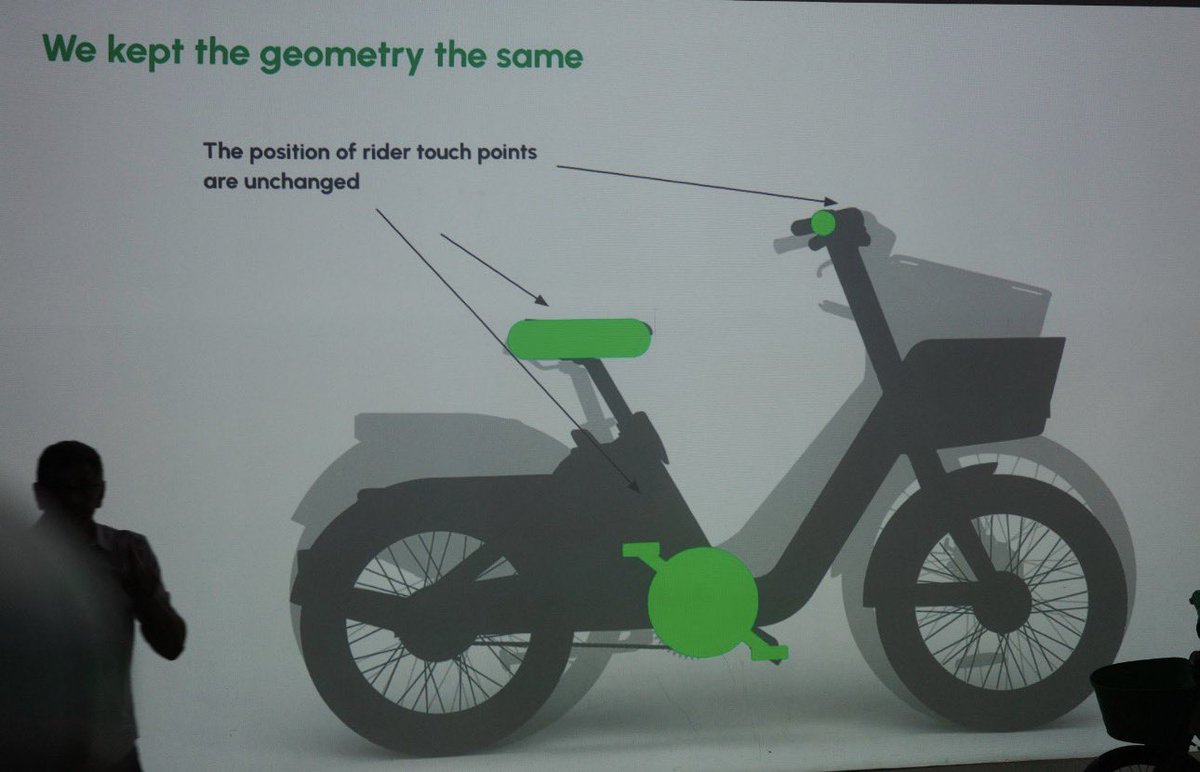
You’re right on the center of mass point
IMHO smaller wheels > much higher vertical acceleration when hitting obstacles
> worse comfort and stability in real urban conditions
So it feels like these bikes are just optimized for handling when stopped and operational efficiency, rather than actual riding dynamics
Which is… an interesting trade-off
Hey @nhfoley, we’ve both been out of micromobility for a while, but I need your take on these new Lime bikes.
“We kept the geometry the same.”
Is that:
- maturity of the category
- or lack of real innovation?
Feels like we’ve moved from product evolution to pure ops optimization.
Nevertheless a signal that the category has plateaued on hardware innovation.
Agree or am I missing something?
What looks like “driving” is actually hundreds of micro-decisions per minute.
Most of them are never measured.
What we’re building at @Mettis_AI is the ability to capture, structure, and understand those decisions in real time, not just what the driver does, but why.
Because driving is not just rules. It’s intent.
Every hesitation, every adjustment, every interaction with other road users carries meaning.
For now, this allows us to make evaluation objective.
But the real opportunity is bigger:
→ understanding human behavior at scale
→ building datasets of real-world driving intent
→ enabling systems that can anticipate what humans will do next
That’s where this is going. 🚀
The interesting part isn’t where the Cybercab charging port is, it’s how little importance it gets.
That strongly suggests automated depot charging (wireless or robotic) as the primary mode.
The plug feels like redundancy, compliance, and edge-case recovery, not the main UX.
@whatsinside@JoshWest247 This makes sense if Cybercab is designed primarily for automated depot charging (wireless or robotic).
The physical plug likely exists as a fallback / service option, not for daily use.
Hey @elonmusk, will consumer Model Y soon get the side and rear camera washers like in the Austin robotaxi fleet? I guess it would be great for FSD reliability
Not sure why I keep posting on LinkedIn when the valuable audience is here on X.
Resharing Augustin Friedel’s insightful post on global ride-hailing platforms and their AV strategies.
That said, I’m curious: why leave out Tesla in this analysis?
As a vertically integrated player launching Robotaxi services in 2025/2026, Tesla is directly competing in autonomous mobility with a disruptive edge.
Their Austin geofence already spans ~245 sq mi (larger than Waymo’s ~90 sq mi there), and with Cybercab production ramping, they’re targeting fleets at a fraction of the cost, under $30K per vehicle vs. Waymo’s estimated $100K+ setups.
Autonomous vehicles and ride-hailing won’t scale if the underlying tech isn’t scalable. Tesla’s vision-only approach, relying on advanced computer vision and neural networks trained on massive real-world data, allows for rapid iteration and deployment across diverse environments without the hardware dependencies of LiDAR-based systems like Waymo’s, which require expensive sensors, meticulous mapping, and slower adaptations to new areas.
For the same capital, Tesla could deploy 3-4x more vehicles.
This isn’t just OEM vs. tech, it’s a paradigm shift that could redefine the ecosystem.
Thoughts?
Would love to hear from others in mobility/AV space.
#AutonomousVehicles #Mobility #Tesla #Waymo #RideHailing
Augustin’s original post: https://t.co/LMcpBnuE4L
Real time robotaxi active fleet
https://t.co/SWXeou4qZr
@SawyerMerritt the 1200-volt platform is interesting. The driver, Marc Basseng, "backs out of it" at 472kph since "he perceived stability issues" that made him hesitant to continue at that pace
@FxbMeta@TELOtrucks I’m sure they could do a cheaper 2WD, ~50 kWh, lower-power spec around $30k. But AFAIK most orders today are for the long-range, high-spec model. A $30k trim would be more of a headline-grabber than something buyers actually choose
I’d not only reserve a truck, I’d invest in @TELOtrucks. They seem like a team that knows exactly what they’re doing. Cool people, great vision, and a product that’s finally something fresh.