Great new work from @GT_EPIC_Lab ! Moving Assistive Mobility Forward with AI presents an exoskeleton controller that holistically captures major terrain variations encountered during community walking in real-time🤖👨🔬💫💫
https://t.co/xnyMfwYHr4
Great new work from @GT_EPIC_Lab ! Moving Assistive Mobility Forward with AI presents an exoskeleton controller that holistically captures major terrain variations encountered during community walking in real-time🤖👨🔬💫💫
https://t.co/xnyMfwYHr4
The dataset used to train the deep learning models and the CAD for the exoskeleton is all available for other researchers to use in their own work. https://t.co/0Q26zWTR91
Our work newly published in Science Advances, presents an AI-based exoskeleton controller able to estimate states of ground slope and gait phase to provide assistance for community ambulation. https://t.co/NstD4ZHq9H
The AI-based controller gives improved metabolic reductions in comparison to conventional assistance approaches with no specific tuning needed! The system can function in multiple real-word terrains with varying slopes.
Proud and excited to finally share this awesome project in Nature! We used a real-time data-driven estimate of biological joint moment as a continuous, task-agnostic signal to base our exoskeleton actuator torque around.
https://t.co/vct7rapXHY
Engineers in @MEGeorgiaTech@GT_EPIC_Lab have created an AI-driven controller for robotic exoskeletons that helps users in dozens of real-world tasks — even those it wasn’t trained for. Out today in @Nature: https://t.co/nIF0grh6e4
Wearable robots that assist leg movements could transform the lives of people with reduced mobility — but only if the devices can adapt in real time to support a vast range of human activities https://t.co/sVTSyDwAyv
Generalizing exoskeleton control across activities is a key challenge in bridging the gap to real-world viability. Our work contributes directly to this challenge – leveraging human biomechanics opposed to discretized descriptions of human movement.
In our new Nature publication, we present a deep learning-based, task-agnostic exoskeleton controller evaluated on over 30 human activities – a major effort towards real-world viability of exoskeletons.
https://t.co/aqVzAyDsC7
We’ve also released the 25-participant dataset of human biomechanics and exoskeleton sensor data used to train and validate our approach, including activities like walking, running, jumping, and cutting:
https://t.co/5MnqZg6iHA
Some big EPIC lab work featured in this years Woodruff Buzz! Read about our projects on machine learning based state estimators, powered prosthesis control, pediatric rehab, and balance augmentation (p38-39).
The fiscal last year has been nothing short of a huge success! The Woodruff School's annual magazine, Woodruff Buzz, is filled with buzzworthy stories related to student success, research preeminence, and community and culture.
https://t.co/RTXlAf314U
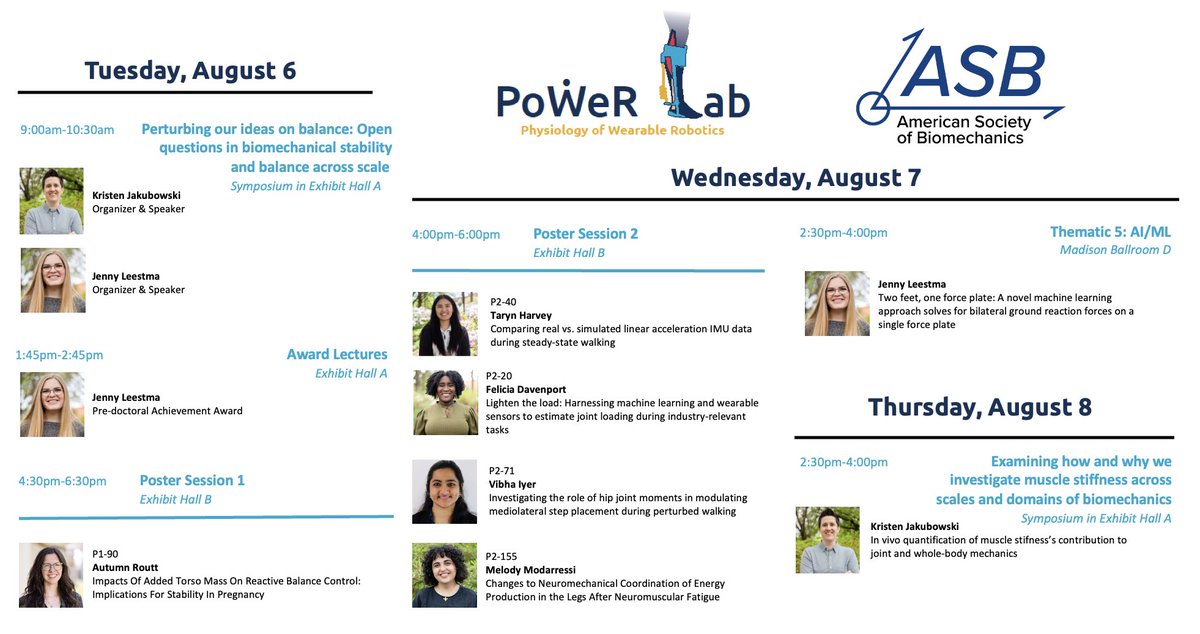
Check out PoWeR labbies at ASB 2024! We’re showcasing the lab’s awesome work through posters/thematic sessions, plus @KJakubowski26@jenniferleestma leading some great convos in their symposiums! @AmSocBiomech
Congratulations to Dr. Scherpereel! This Tuesday, Keaton successfully defended his PhD and became the newest graduate from the EPIC lab (co-advised by Aaron Young and Omer Inan).
Our new paper is out now - "A data-driven approach to estimate human center of mass state during perturbed locomotion using simulated wearable sensors" in Annals of Biomedical Engineering!
Paper: https://t.co/pGtIXGshK1
@GT_EPIC_Lab@GT_PoWeR_Lab@gregory_sawicki