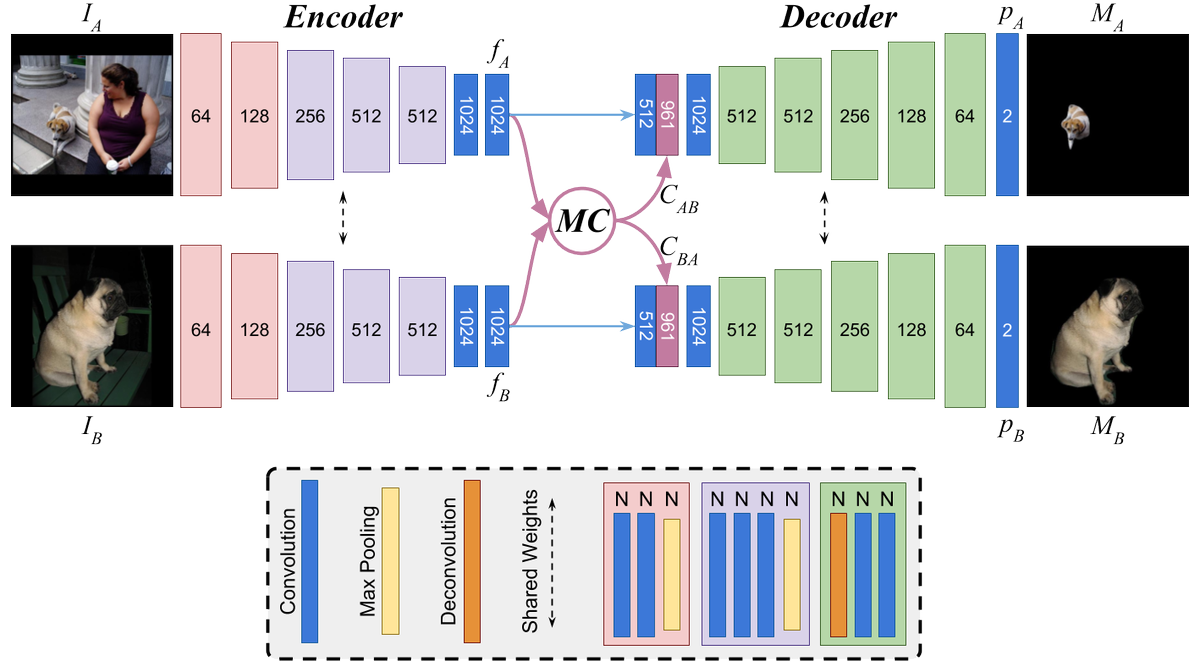
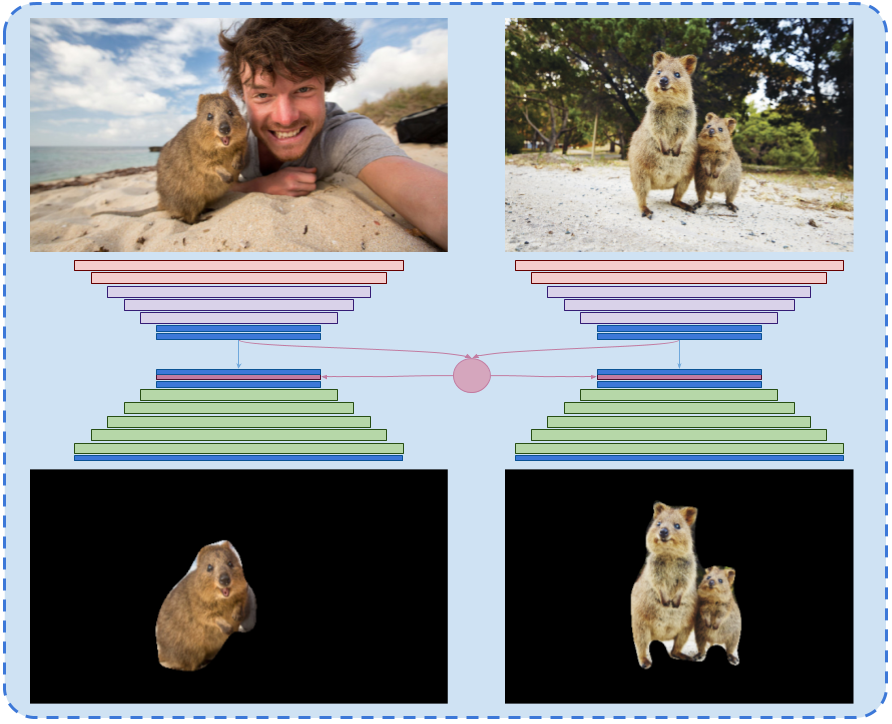
We've released the #Caffe version of our work "Deep Object Co-Segmentation". It's a joint work with Weihao Li(@HitWeihao) at @LabHeidelberg.
Source-code: https://t.co/kZjDuLJS3Y
Project-page: https://t.co/p31RzfyO9V
We will release the @PyTorch version soon.
Two papers accepted to @ICCV19! Neural-Guided RANSAC (NG-RANSAC): A neural network guiding RANSAC data point selection, and Expert Sample Consensus (ESAC): An ensemble of scene coordinate experts for scalable camera re-localization. #ICCV2019#ComputerVision#DeepLearning
This years @ICCV19 comes with the 5th (!) International Workshop on Recovering 6D Object Pose (R6D). Past iterations were incredible, and YOU can be an active part of the current one :)
Submit a paper until 11th August!
More info: https://t.co/2YELPKxkQ9
#ICCV2019#ICCV19#ICCV
The R6D workshop at @ICCV19 includes a new BOP challenge (Benchmark for 6D Object Pose Estimation): https://t.co/ZpGFPrfUW5
Submission is open until 14th Oct.
A range of awards is waiting for the best teams!
#ICCV2019#ICCV19#ICCV
New retro wave of #ComputerVision: NG-RANSAC brings you the greatest hits of the 80s: RANSAC, multi-layer perceptrons, (classic) reinforcement learning. Lens flare for visualization of "cool", only. The paper: https://t.co/OH1tZjOnXM
#ICCV2019#ICCV19#ICCV#DeepLearning
What to do if your re-localization method works for small environments but not big ones? Cut it into small pieces of course! Straight forward, but interesting implications if you still want to train everything jointly and end-to-end. #ICCV2019#ICCV19#ICCV#DeepLearning
We've published @pytorch code of Differentiable RANSAC for a toy problem: fitting lines. A CNN learns to predict points (middle) to which we robustly fit lines, trained end2end with DSAC. Right: A CNN which learns to predict line parameters directly. Code: https://t.co/25Tv6927LC