Introducing OAK 4 + Luxonis Hub
AI can only solve the problems it can see, and putting sensors, compute, and vision into the real world has always been the hard part.
OAK 4 changes that. Powered by @Qualcomm, it delivers 52 TOPS on-device, runs multiple models in parallel, and works fully standalone with no host PC or cloud.
With Luxonis Hub, you can deploy models, update apps, and manage devices remotely with zero setup.
It’s time to see what you’ve been missing.
Learn More: https://t.co/tMqMAECshU
OAK Viewer 3.0.2 is here, and it's the smoothest version yet.
Faster across the board. Point cloud visualization that's sharper and more responsive, so you can actually see the depth you're capturing. Smarter error handling that tells you when your device is offline, underpowered, or having a bad day, instead of leaving you guessing.
Plus cleaner disconnects, better recovery, and a long list of UI polish.
Download: https://t.co/L4gwFxF3bB
OAK Viewer 3.0.2 is here, and it's the smoothest version yet.
Faster across the board. Point cloud visualization that's sharper and more responsive, so you can actually see the depth you're capturing. Smarter error handling that tells you when your device is offline, underpowered, or having a bad day, instead of leaving you guessing.
Plus cleaner disconnects, better recovery, and a long list of UI polish.
Download: https://t.co/L4gwFxF3bB
Meet Luxonis Chat 2.0. Your AI co-pilot for everything OAK. Try it: https://t.co/VPHPFn27wL
Need a code snippet, a debugging hand, or help picking the right device? It pulls from our docs and community knowledge to get you unstuck in seconds.
New UI, chat history, mobile layout, dark mode, and 40% faster responses than before.
Trained your own AI model? Get it running on an OAK 4 in minutes.
Upload to Luxonis Hub, convert for RVC4, deploy to the device. We walk through it with a real solder defect detection model from start to finish.
Full walkthrough:
https://t.co/iOvT9zrcVw
Want to run your own YOLO model on a camera? Here's how to do it on OAK 4 in 2 minutes.
No host computer. No cloud. Just your model running directly on the device, detecting objects in real time.
Full walkthrough:
https://t.co/yhnetcd1bC
OAK 4 CS now supports PTP synchronization.
Sync multi-camera exposures over standard Ethernet. No FSYNC wiring, no daisy chains, no trigger cables across long distances. Just a shared clock distributed over the network.
For multi-camera perception, distributed AI vision, and sensor fusion at scale.
https://t.co/jfz2x5MEkA
Precision agriculture means making split-second AI decisions while moving at tractor speeds through dirt and heavy vibration.
Farm-ING is transforming sustainable farming by integrating Luxonis OAK-D S2 PoE cameras directly into their smart weeders to target individual plants.
⚡ Rapid Development: Ready-made vision architecture so they can focus on core IP.
🧠 On-Device AI: Ultra-low latency for high-speed, real-time accuracy.
🛡️ Rugged Reliability: IP-rated to survive the harshest outdoor environments.
Smart enough for high-speed edge AI, rugged enough for the dirt.
📰 Read the customer story: https://t.co/u6XCbgJ0uZ
🛒 Shop OAK-D S2 PoE: https://t.co/gnYOS4NywB
#AgTech #EdgeAI #ComputerVision #Robotics #Sustainability
Still thinking about what those PoliMi students built over the weekend in our first international hackathon, hosted by GDG AI
It used to take massive engineering teams and millions in R&D to build hardware-based AI products. But when you remove the friction of building custom vision stacks from scratch, the barrier to entry disappears.
The next generation of small-team startups won't be confined to just SaaS. They are going to build the physical future.
Just look at what they built in 48 hours:
🥇 FORMA: Instant biomechanical PT coaching (Video attached)
🥈 ParC: Early Parkinson's detection from facial signals - https://t.co/b2RbHV5Ro7
🥉 SeeCure: On-device room safety and evacuation mapping - https://t.co/io1UvPtahR
🏅 OAK-ULUS: Touchless, sterile surgical cockpit - https://t.co/UXyWaGL2dC
🏅 Honorable Mention: OAK-ULUS
A touchless surgical cockpit. Surgeons can manipulate 3D CT/MRI scans and manage operating room dashboards entirely contact-free to preserve sterility. It uses millimeter precision to isolate surgeon gestures and filter out background movement.
https://t.co/87xBG7hXJm
Just wrapped our first international hackathon in Milano!
We handed OAK-4D setups to 48 PoliMi students for the GDG AI Hackathon. For most, it was their very first time touching our hardware. What they built in just 48 hours is unreal.
Here are the winners 🧵👇
🥉 3rd Place: SeeCure
The ultimate on-device safety officer. One camera replaces fire systems, people counters, and earthquake detectors. It runs depth, IMU, and a YOLOv8n exit-sign detector natively on the edge to generate a live 3D safety and evacuation map.
https://t.co/YQNYxiJwUE
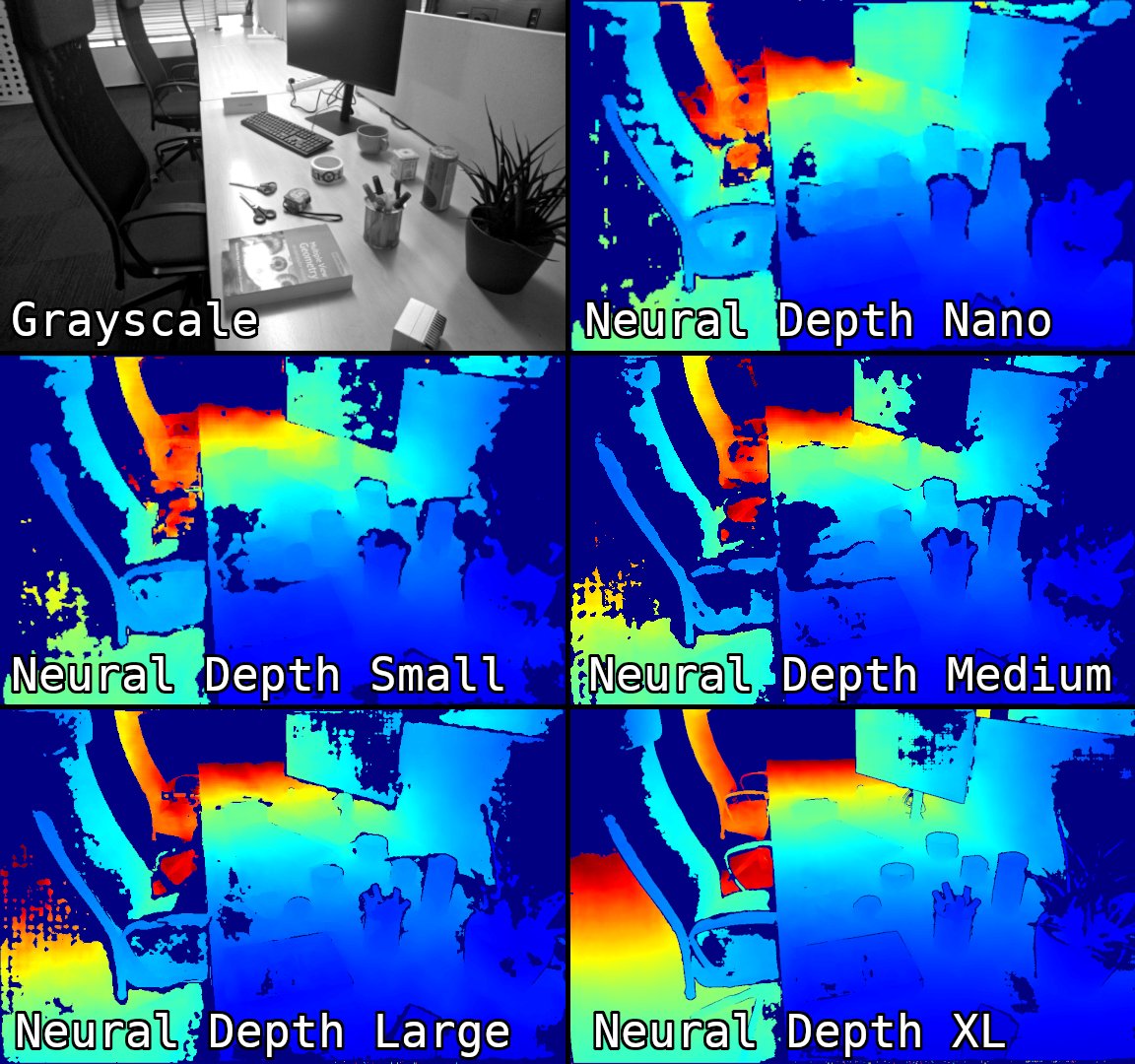
More on v3.6.1. The new XL neural depth models:
1248x780 @ 8.5 FPS
1056x660 @ 11 FPS
864x540 @ 17 FPS
768x480 @ 22 FPS
Higher resolution means finer detail with thin structures, object edges, small geometry...
All while maintaining a high fill rate...
The trade-off between traditional stereo and neural is closing
LENS neural stereo depth got a major speed boost in DepthAI v3.6.1.
Nano model: 60 to 85 FPS. Large model: 10 to 22 FPS. All on device.
Four new high-res XL models added, up to 1248x780. For when classical stereo can't cut it on textureless surfaces or tough lighting.
Full release: https://t.co/mDzfBB77bh
Tracking objects through crowded scenes and occlusions is one of the hardest problems in edge AI.
The DepthAI v3 Object Tracker just got a major upgrade to solve this.
• 3D Velocity Estimation: You can now track an object's speed and direction natively in m/s directly from the tracker.
• Spatial Association: Maintain stable IDs even when objects cross paths. The tracker can now use camera depth to monitor actual 3D coordinates, rather than relying on 2D image overlap (IoU) that fails during partial occlusions.
It remains lightweight, optimized for real-time edge processing, and drops into your existing pipelines.
📰 Read the Writeup: https://t.co/eg7Km7ZNyd
💻 Check the Docs: https://t.co/Z9AoNe4WKJ
#ComputerVision #EdgeAI #Robotics #SpatialAI #DepthAI
AutoCalibration is now on by default in DepthAI 3.6.1
Stereo depth cameras drift over time from vibration, thermal cycling, impact. DepthAI now monitors and corrects calibration continuously during runtime. No code changes, no targets, no intervention.
pip install depthai==3.6.1
Full Release: https://t.co/iGv4SMIH60
DepthAI v3.6.1 is out now
AutoCalibration on by default. Stereo depth that heals itself during runtime, no intervention needed.
YOLO26 support. NMS-free inference, built for edge.
Neural depth (LENS) up to 2x faster. The nano model now runs at 85 FPS on device, and Large at 20 FPS.
+ We've introduced some XL models
pip install depthai==3.6.1
Full release notes: https://t.co/3p0zXN7h0j