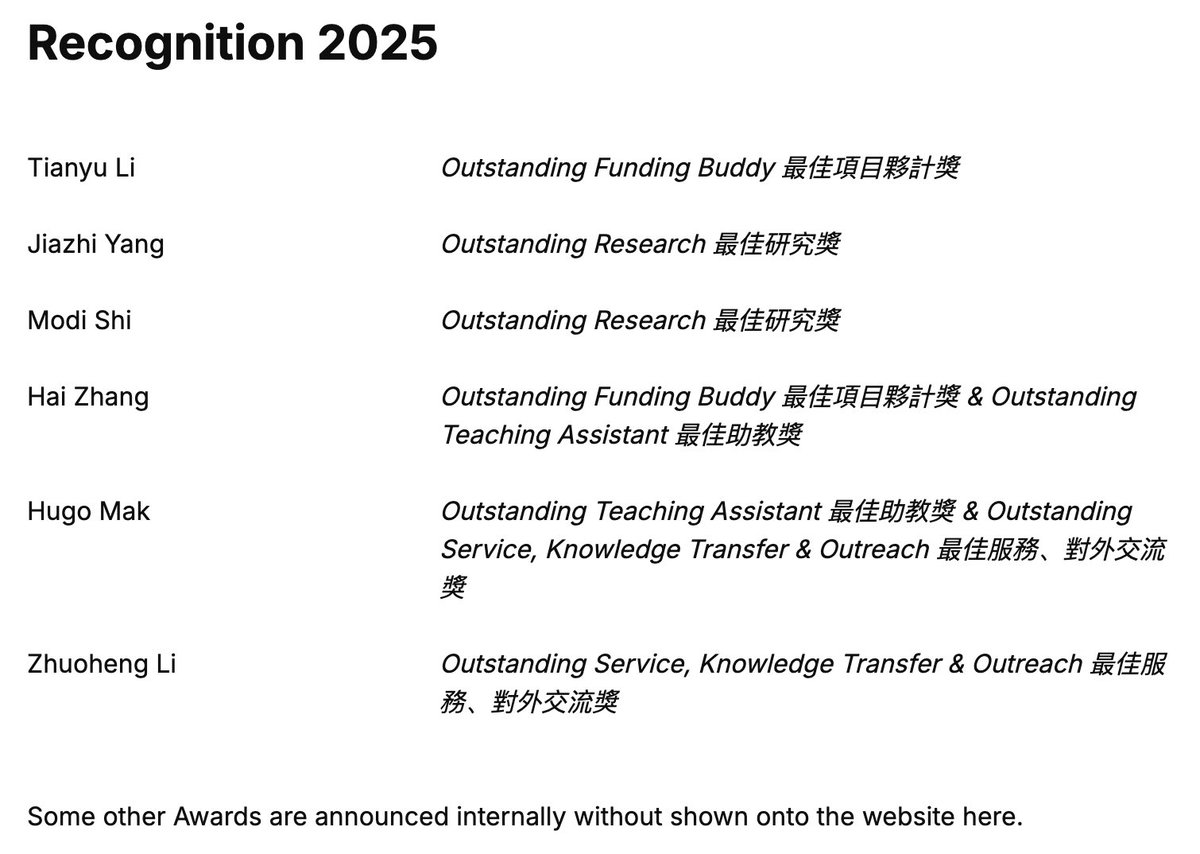
📣 #Recognition#ResearchAward As we usher in the Year of Horse, our team recognizes outstanding members from the past year in the exceptional contribution of areas. Congratulations!!! Let’s rock ‘n’ roll in 2026 🕶️🍾🎆🥂#opendrivelab
🚀 Join us at the #CVPR 2026 Workshop:
From Labs to Life: Embodied Intelligence in the Wild
(https://t.co/XORtHTzefX)
As embodied AI moves into the real world, we ask: how can agents perceive, reason, and act reliably in the wild?
Featuring invited talks from: Hao Su, Zhiyu Huang, Jiahui Lei, Yilun Du, Rika Antonova, Jiatao Gu.
📅 9:00 AM - 5:30 PM, June 3, 2026
📍 Four Seasons 1, Colorado Convention Center.
#CVPR #EmbodiedAI #PhysicalAI #Robotics
🎉 Excited to share our recent work SimScale, which has been accepted to CVPR 2026 as Oral presentation!
🤖Can we improve policies via scaling synthetic experience?
😢End-to-end driving policies struggles on safety-critical & OOD scenarios that are rare in human logs.
To tackle this, SimScale features:
🏗️ A scalable simulation pipeline synthesizes diverse, high-fidelity reactive driving scenarios upon existing logs. (See attached visualization as one synthetic data sample).
🚀 With pseudo-expert demonstrations, Sim-real co-training boosts LTF / DiffusionDrive / GTRS-Dense, up to +8.6 EPDMS on navhard, +2.9 on navtest.
🔬 Performance scales smoothly by adding simulation data alone, with no extra real-world data needed.
Joint effort by @HCTian713, @francislee2020, @OpenDriveLab, @sephy_li
📢📢📢 Call for Contributions @ RSS 2026
Towards Robust Execution of Long-Horizon Whole-Body Control Tasks
🧑💻👩💻🧑💻 Speakers:
- Javier Alonso-Mora (TU Delft)
- Leslie Pack Kaelbling (MIT)
- Shan Luo (King's College London)
- Hamidreza Kasaei (University of Groningen)
- Roberto Martín-Martín (UT Austin)
- Fan Shi (NUS)
📝📝📝 Call for Contributions:
We invite researchers to share their work with the community through submissions to the workshop in a variety of formats beyond traditional papers, including reports, demos, video, and etc. Submissions may include research papers or reports, but we equally welcome alternative formats such as videos demonstrating systems in action, demos, interactive artifacts, or other creative presentations of research ideas. We particularly welcome ongoing, preliminary, or exploratory work.
🌍🌍🌍 Website:
https://t.co/qIdp1JDVqj
#RSS2026 #AI #Embodied
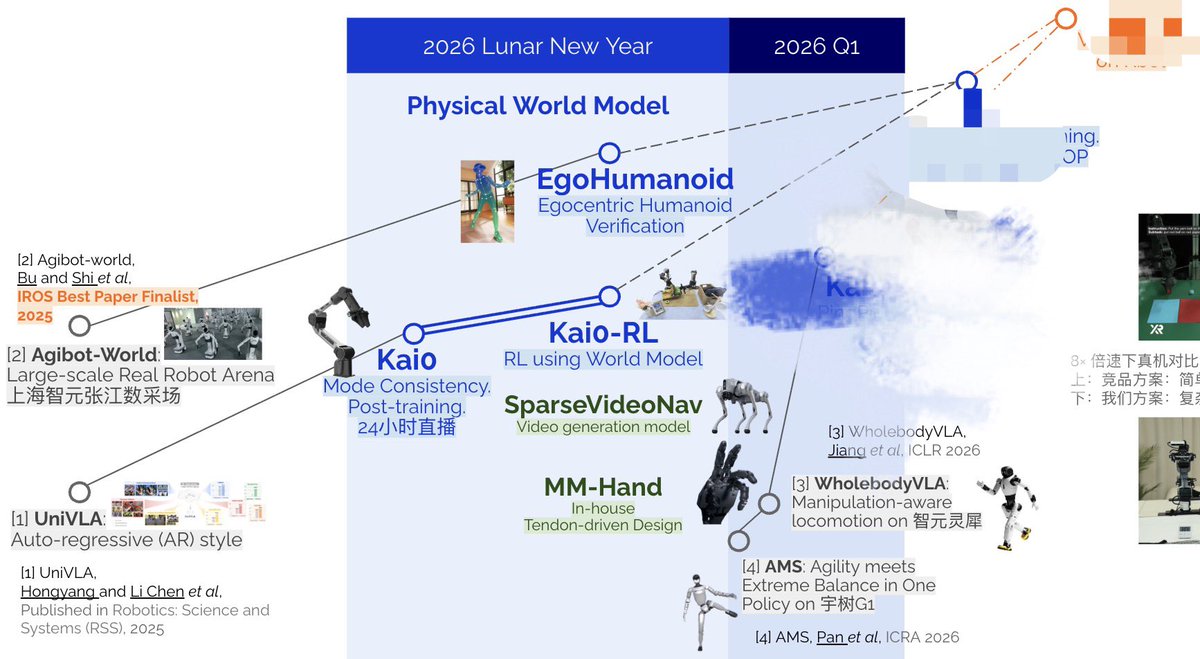
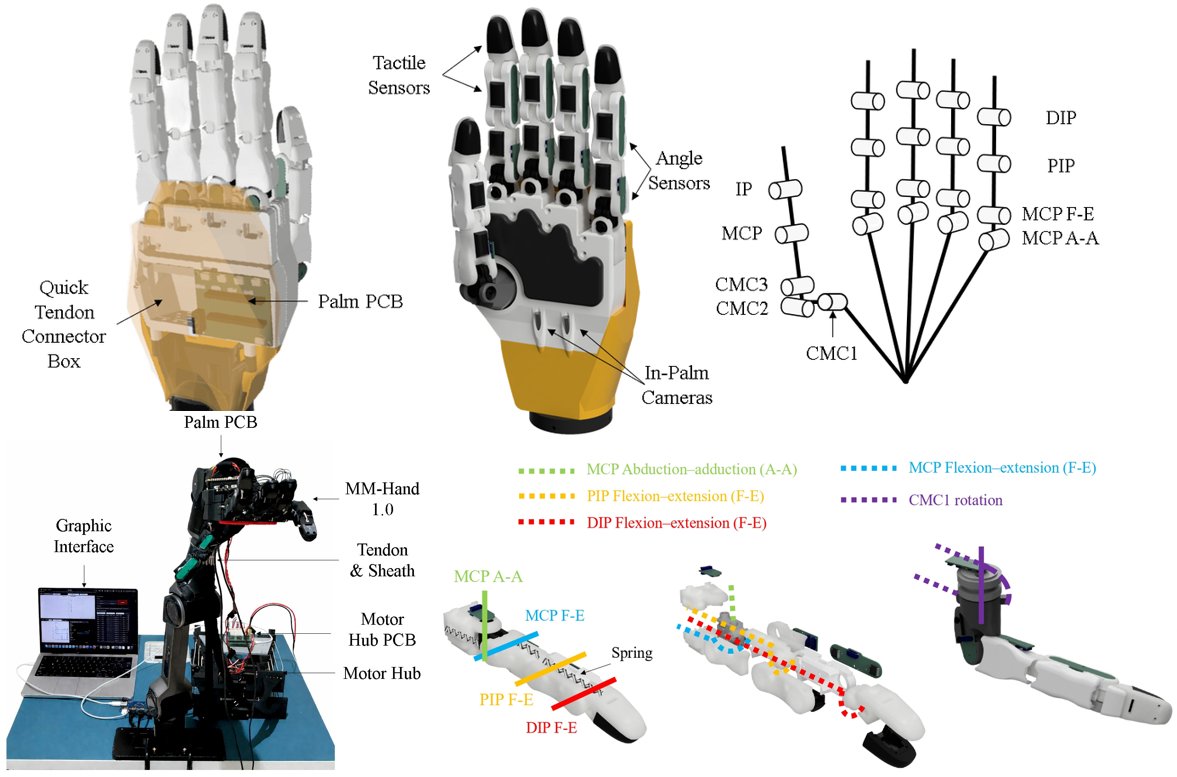
🚀 MM-Hand 1.0 Tech Report released: a 21-DoF multi-modal modular dexterous robotic hand with remote tendon-driven actuation.
Motors are relocated outside the hand, freeing space for tactile sensors, joint encoders, in-palm stereo vision, and maintainable modular fingers.
MM-Hand achieves 25N fingertip force through 1m tendon-sheath transmission and supports closed-loop joint control for dexterous manipulation research.
Paper: https://t.co/K7L7BaW8uS
Page: https://t.co/8QpHEZeTQi
#Robotics #DexterousHand #EmbodiedAI
【5/5】That's all!
Hope #WorldEngine brings you fresh insights into post-training infrastructure for Physical AI.
If you find it useful, please give it a star 🌟!
Github: https://t.co/tGfsaQm91z
Huggingface: https://t.co/mYNC9MWqAZ
Project Page: https://t.co/c2ikAQjddE
Teamwork from @OpenDriveLab
Shoutout to @sephy_li@ilnehc@francislee2020@CaojunWang@GeorgeL94133026 📢
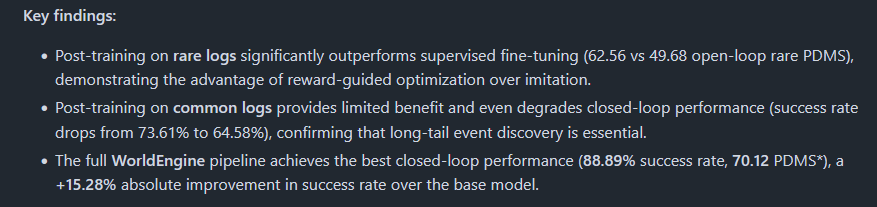
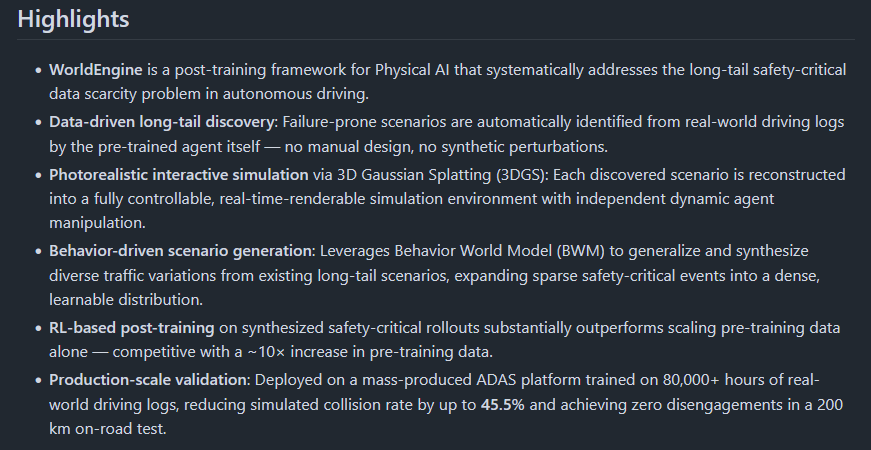
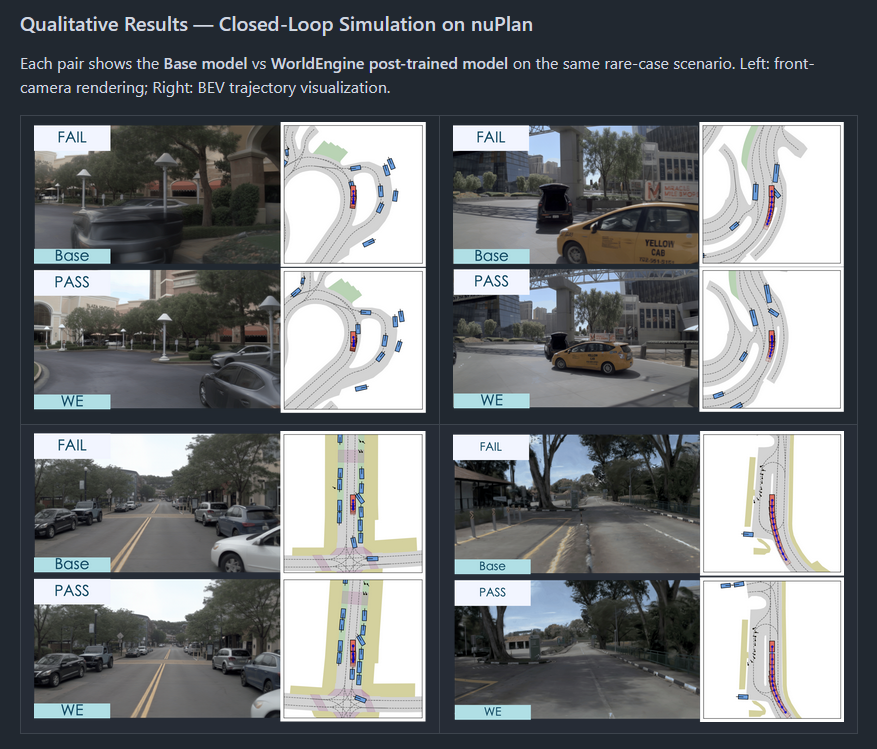
【1/5】🌍 WorldEngine: Towards the Era of Post-Training for Physical AI
🎯 A post-training framework for Physical AI that systematically addresses the long-tail safety-critical data scarcity problem in autonomous driving.
🧱The missing infrastructure for Physical AI post-training in AD. Open-source. Production-validated.
https://t.co/tGfsaQm91z
#WorldEngine #PhysicalAI #OpenDriveLab
UMI made robot data collection intuitive.
🤖 TAMEn takes it further — bringing vision and touch into a unified, closed-loop learning system.
🌏 https://t.co/wkT2y1fFwz
📑 https://t.co/YZMsgFgth0
🔗 https://t.co/ITRNRG570p
✨ What’s new:
- Dual-mode data collection (MoCap ↔ VR)
- Online replayability check
- AR-in-the-loop + real-time tactile feedback (tAmeR)
- Self-evolving pyramid data pipeline
🚀 Results:
34% → 75% success rate on bimanual tasks.
This marks a shift from usable data to self-improving data engines.
TAMEn turns robots from "blind operators" into tactile-aware, evolving collaborators.
#EmbodiedAI #Tactile #Robotics #Bimanual #TAMEn
#WorldEngine is one of the most exciting projects in AD in the past years!
It's a post-training framework tackling the scarcity of long-tail safety-critical scenarios by: mining -> 3DGS reconstruction and dynamic agents control w/ behavior world models -> RL post-training.
Physical AI post-training (especially for AD) has been constrained by the high cost of real-world interaction.
Now, WorldEngine offers a promising solution
Let's go for WorldEngine! Incredible work from @OpenDriveLab!
Introducing #WorldEngine, https://t.co/UK3vsulS2u, a two-year long project. The missing infrastructure for Physical AI post-training in Autonomous driving. Open-source. Production-validated.
SimScale is selected as CVPR 2026 Oral 🎉🥳
Code, simulation data, and checkpoints have been fully open-sourced.
📷Home: https://t.co/ejTgqZ3NbW
📷Paper: https://t.co/euJW2MOtOE
📷Github: https://t.co/AxuTMvqVGk
If you find something useful, please give it a star⭐
🚀 EgoHumanoid is now open-sourced!
A framework to realize human-to-humanoid transfer for loco-manipulation.
Full pipeline released: Pico human data collection → Unitree G1 robot data collection→ VLA training & deployment. All code available 👇
⭐ https://t.co/n7IBvhKHYf
🚀 Introducing SMASH — the world’s first high-dynamic humanoid robot for outdoor table tennis, fully autonomous with onboard perception.
No motion capture needed—SMASH uses only onboard sensors for stable, full-body human–robot interaction in real-world settings.
Embodied intelligence is stepping out of the lab.
🔗https://t.co/xphEg4HuoG
#HumanoidRobots #TableTennis #RobotLearning #SportsTech #AI #OpenDriveLab #Algorithms