Multimaterial 3D printers can fabricate designs with spatially-varying material blends, but current design software tools cannot represent these designs, so we made OpenVCAD - a multimaterial design compiler: https://t.co/AAQPHA4lqD
Impact mitigation is ubiquitous, from packing materials to personal sporting equipment to car bumpers - the goal is to reduce peak accelerations in a finite space. Our result shows how to do this better by using a 3D printed metamaterial geometry. https://t.co/4Rhd8YQfrA
Our new paper enables "Pantone for material properties". It shows a user of a 3D printer how to achieve specific material properties using a small set of "primary" materials and digitally mixing those materials during the print.
https://t.co/rRHWyYx7cV
Our paper showing how solid materials can be directly printed on top of liquids in an inkjet context was published in Additive Manufacturing, solving a longstanding support-removal problem, and expanding the inkjet AM material palette.
. https://t.co/rydCo1nddk
Our paper showing that a lumped parameter model can be used to efficiently simulate compliant robots actuated via HASELs was published in the RoboSoft '22 proceedings.
https://t.co/h9Iy8K5DMG
Another new paper by Lawrence Smith et al. featuring @GibbonToolbox for soft robotic actuator design:
"Stretching the Boundary: Shell Finite Elements for Pneumatic Soft Actuators"
https://t.co/SiDaLHO9Qf
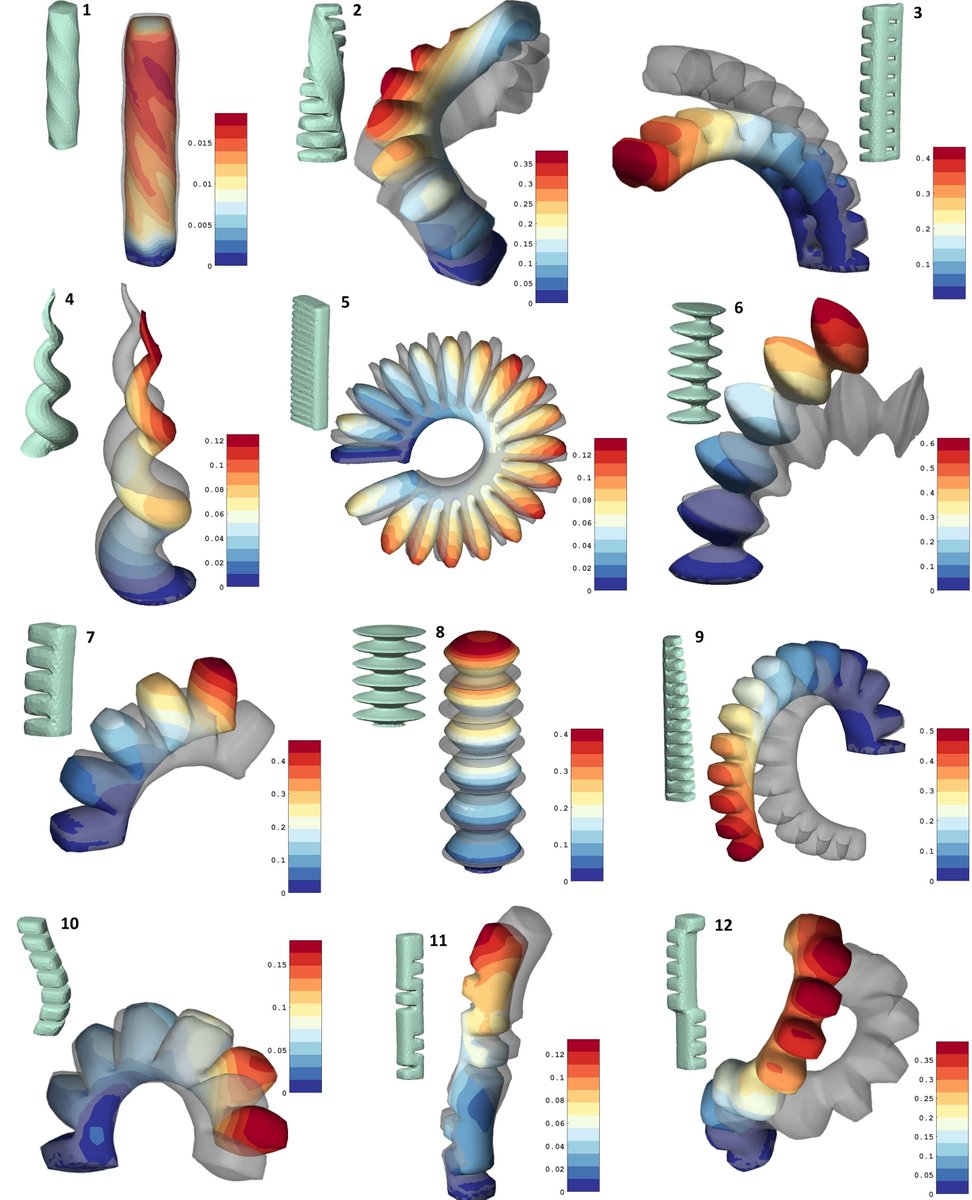
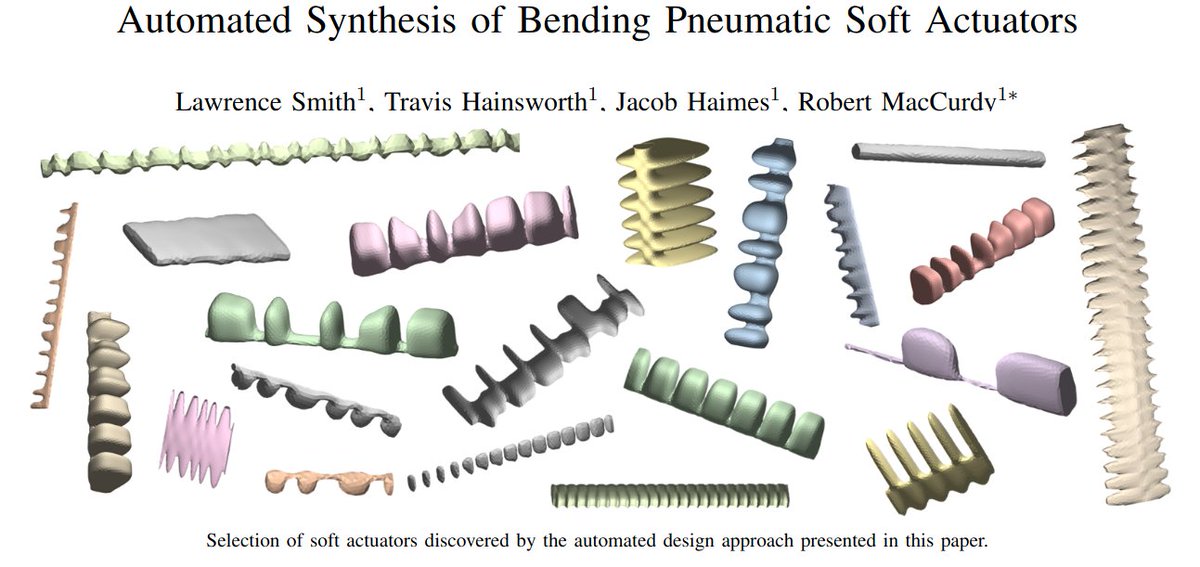
New paper by Lawrence Smith et al. featuring @GibbonToolbox for soft robotic actuator design:
"Automated Synthesis of Bending Pneumatic Soft Actuators"
https://t.co/0Z55D4VwCB
I'm excited that our paper, "A Seamless Workflow for Design and Fabrication of Multimaterial Pneumatic Soft Actuators", won the IEEE-CASE Best Application Paper Award! Congratulations Lawrence, Travis, Zach, and Xavier! See: https://t.co/MMU92LGPsB