@jietang@teortaxesTex On benchmarks, yes, but as measured by true usefulness even Q1 would be very impressive.
Anthropic has rightly focused on maximizing useful intelligence, which does not show up in benchmarks, but definitely shows up in revenue.
@NVIDIA is working on one of the hardest problems in Physical AI so you don’t have to: generalist robotic pick-and-place.
We are excited to introduce GraspGenX at #CVPR2026—a foundation model for robotic grasping that works out of the box for unknown robots, novel objects, and unseen environments.
Unlike Vision-Language-Action (VLA) models or dedicated grasp networks that require expensive, embodiment-specific training, GraspGenX is cross-embodiment and works zero-shot. You simply pass a "robot prompt" alongside an image of the object to generate actions.
🚀 Key Highlights:
1) Scaling: Trained on over 2 Billion 6-DoF grasp rollouts entirely in physics simulation—a dataset size practically impossible to collect via real-world teleoperation.
2) Zero-Shot Transfer: Works out of the box for several common robot grippers widely used across the research community and industry.
3) Built for the Agentic Era: Features native MCP support, client-server architecture, and skills.md, allowing seamless integration into LLM/Agentic robotics workflows.
4) Full Pipeline Integration: Pair it with other open foundation models (like SAM3) and advanced motion solvers like cuRoboV2 for full deployment in entirely unknown environments.
If you are currently executing pick-and-place with a VLA or WAM, you can use GraspGenX to generate sim-verified trajectory data and inject it into your pipeline. No need to waste precious real-world engineering hours on data collection for standard manipulation tasks.
🌐Website: https://t.co/a7acm4Pw7N
💻Code: https://t.co/eYUYxCb7Jp
📄Paper: https://t.co/pDOVp0VJLL
📍CVPR Booth: Poster 619 on Jun 6 1:45 session at ExHall F
This work was led by the incredible @BeiningH (Princeton), in collaboration with a phenomenal team at NVIDIA: @erwincoumans, @yu_wei_chao, @balakumar_, @clembow, and Stan Birchfield
#CVPR2026
1/ Today, an internal @OpenAI model has refuted Erdős’s unit distance conjecture — a research result that one could recommend “acceptance without any hesitation” to the Annals of Mathematics, one of the most prestigious journals in mathematics.
We came across it in a side quest to push our model on the hardest problems.
The bitter lesson in 26 words:
Don’t be distracted by human knowledge, as AI has been historically.
Instead focus on methods for creating knowledge that scale with computation, like search and learning.
Want to experience humanoid behavior foundation model in your browser? SONIC Web demo now live at https://t.co/LutwTt1SGl
Featuring:
- Motion tracking
- Text to motion using Kimodo https://t.co/jFwqDdiikv
Try it out!
We have now open-sourced AI4AnimationPy, an entirely Python-based framework for character animation research that combines motion processing, learning, synthesis and visualisation all-in-one in an engine-like manner.
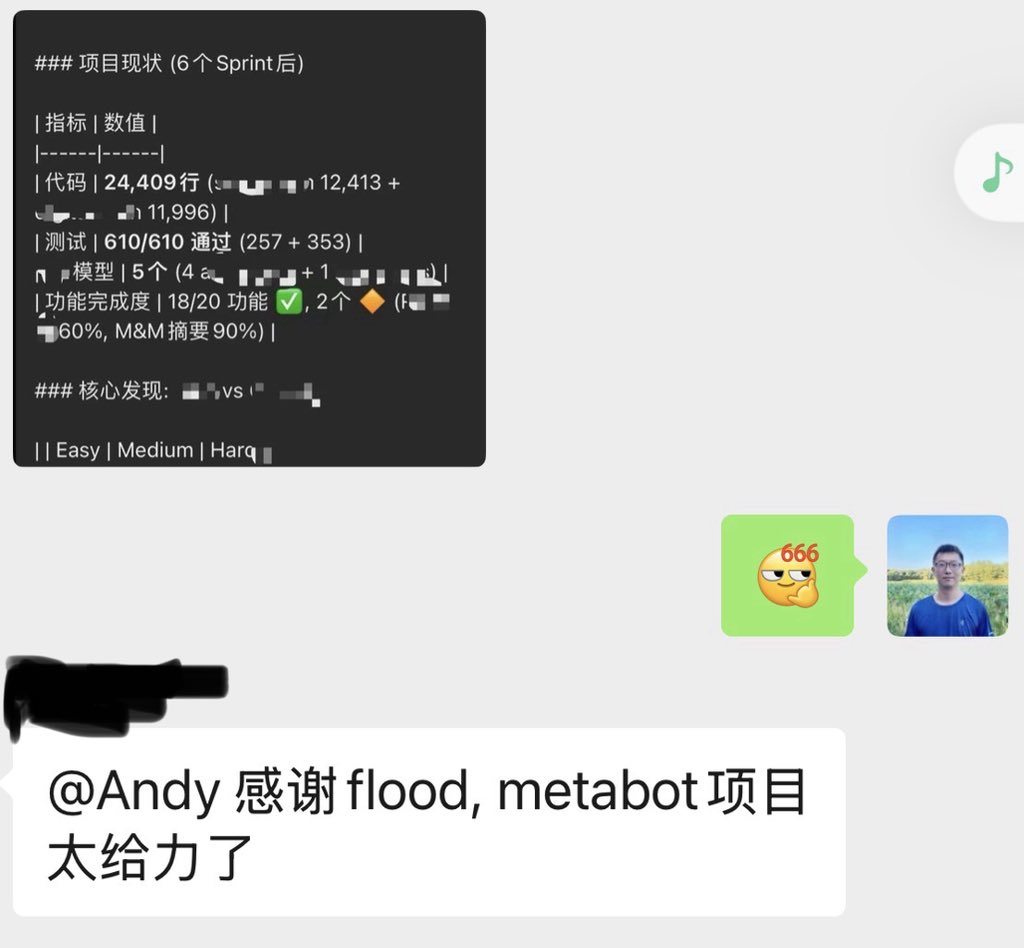
🚀 MetaBot Major Update: Peers Federation is live!
AI Agents powered by Claude Code on different machines can now auto-discover each other & route tasks across instances.
Imagine: 10 machines, each running specialized agents — code review, deployment, data analysis — they self-organize into one collaborative network.
Config = a few lines of JSON.
One command to talk cross-instance: mb talk alice/bot chatId "fix this bug"
📖 https://t.co/A4QnW6Oez7
🔗 https://t.co/Fg2sKsKkkg
#AIAgent #ClaudeCode #MetaBot #OpenSource






![RotekSong's tweet photo. 哈喽发个招聘贴,欢迎志在做humanoid foundation model的同学联系我[抱拳][抱拳][抱拳] https://t.co/1LUaEYdYVa](https://pbs.twimg.com/media/HEtttRcaEAAdmIu.jpg)









![RotekSong's tweet photo. 哈喽发个招聘贴,欢迎志在做humanoid foundation model的同学联系我[抱拳][抱拳][抱拳] https://t.co/1LUaEYdYVa](https://pbs.twimg.com/media/HEtttR6aIAAAQnV.jpg)