ロボットハンドって、どうやって動いてるの?
その鍵を握るのが「駆動方式」。 大きく3種類あります。
① 直接駆動関節にモーターを直接搭載。 高精度・高応答性だけど、指が太くなりやすい。
② ロープ駆動ワイヤーで遠くのモーターから引っ張る。 細くて軽い指が作れる反面、摩擦や伸びの管理が難しい。
③ リンク機構駆動剛体のリンクバーで力を伝達。 シンプルで堅牢、高出力だが、自由度に制限が出やすい。
AIロボットが人間の作業を学習するためには、まず人間の手に近い動きができるハンドが必要。テレオペのデータ品質も、ここにかかっています。
詳しく読みたい人はこちら👇
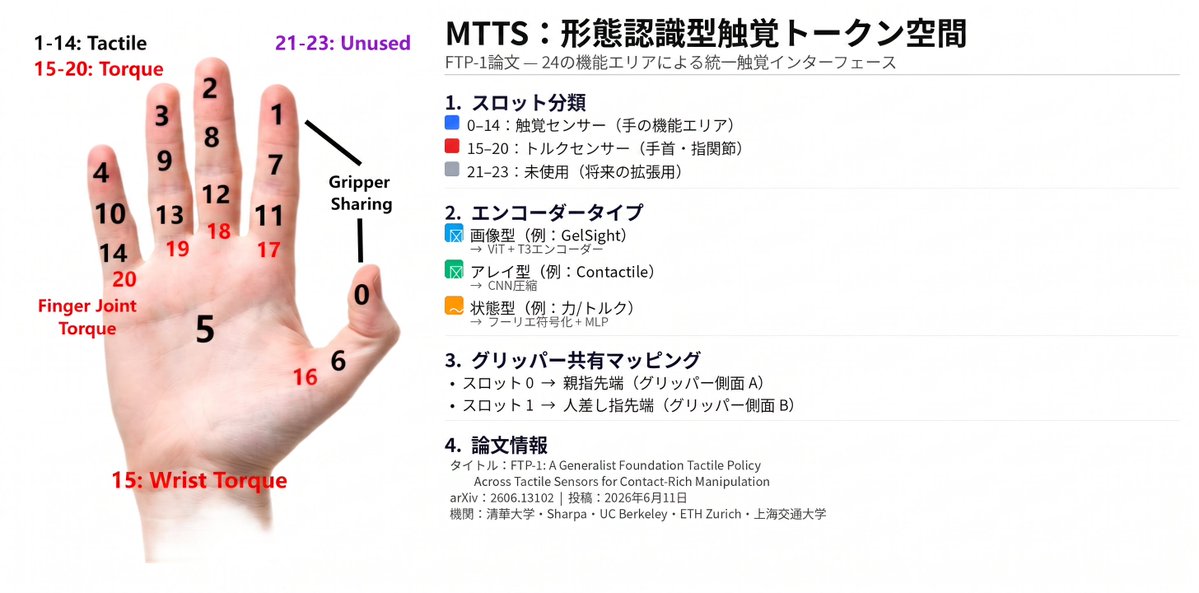
📄 FTP-1: A Generalist Foundation Tactile Policy Across Tactile Sensors for Contact-Rich Manipulation
🔗 https://t.co/aHI7zc520v
プロジェクトページ(動画あり )
🔗 https://t.co/g8WPl4ZwBy