What a way to wrap up @IgluContest!
Our paper “IDAT: A Multi-Modal Dataset and Toolkit for Building and Evaluating Interactive Task-Solving Agents” accepted to @SIGIRConf including:
1) rich multi-modal dataset
2) A data collection tool
3) An online eval framework
#SIGIR2025
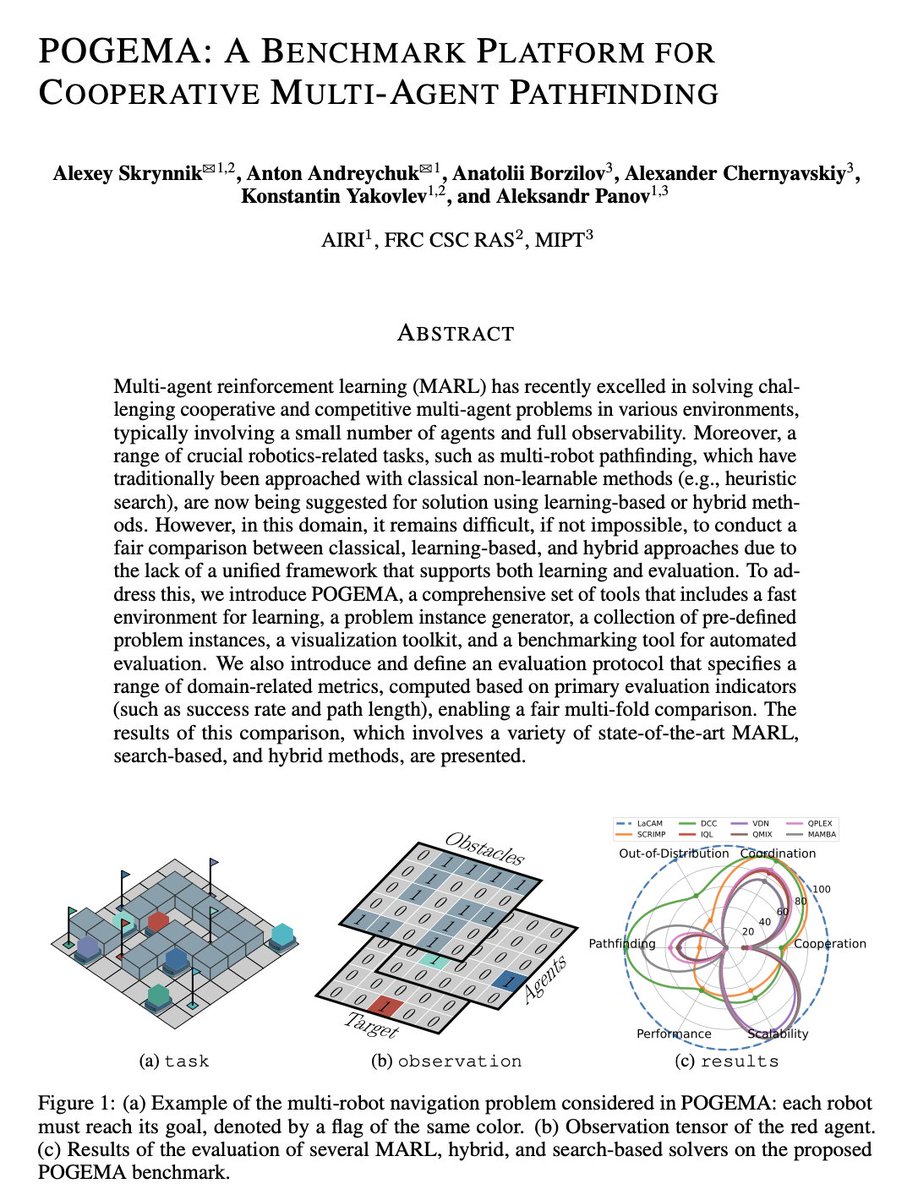
I’m happy to share that our paper, POGEMA: A Benchmark Platform for Cooperative Multi-Agent Pathfinding, has been accepted to the ICLR 2025 Conference!
https://t.co/CBqRc2Rfhd
https://t.co/fwdoU8agv6
See you in Singapore!
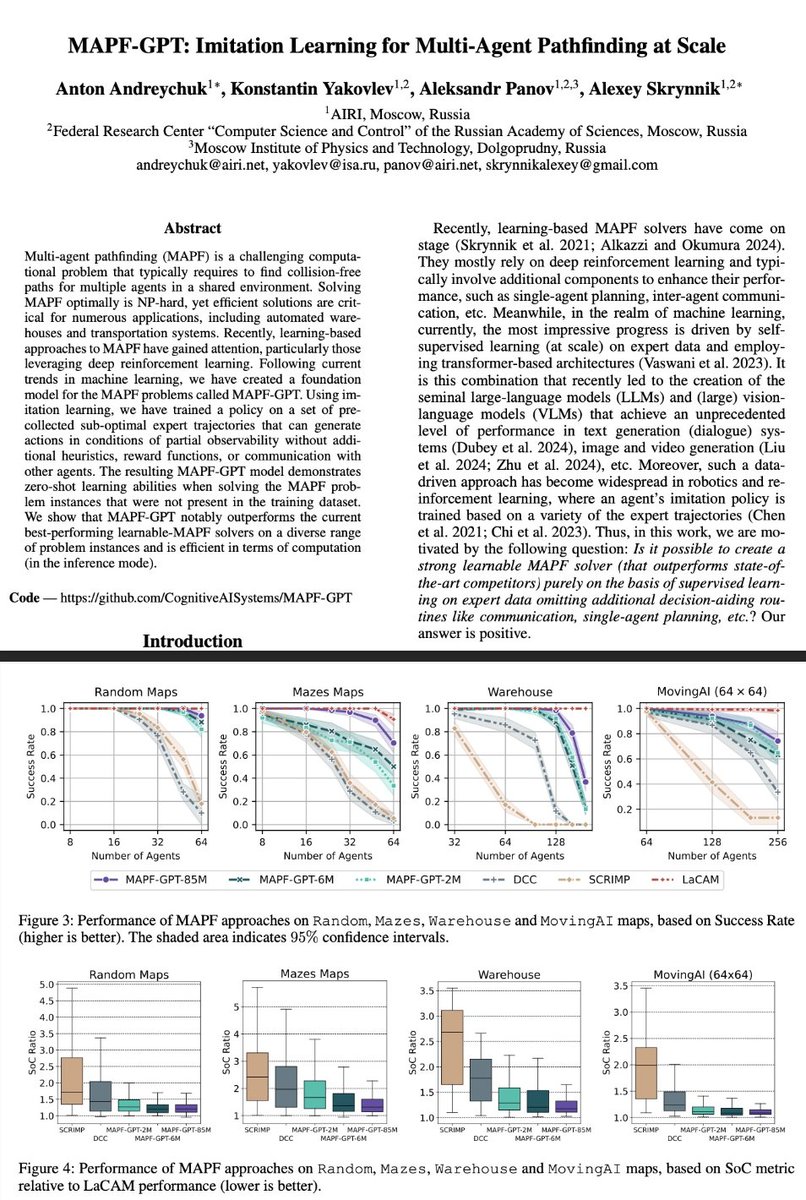
I’m happy to announce that our paper, MAPF-GPT: Imitation Learning for Multi-Agent Pathfinding at Scale, has been accepted to the AAAI 2025 Conference!
https://t.co/GnkB8pOtjg
https://t.co/sbjGAgi6mJ
Here are the links to the preprint: https://t.co/GnkB8pOtjg and the source code: https://t.co/vc8dZFW0nT. The repository includes training code, pre-trained weights for the 2M, 6M, and 85M models (uploaded to HuggingFace), and a dataset of 1 billion observation/action pairs.
MAPF-GPT performs exceptionally well on unseen instances and outperforms state-of-the-art learnable solvers such as SCRIMP and DCC, having better runtime efficiency. (2/3)
I’m excited to announce our recent preprint titled MAPF-GPT, a GPT-like model designed for MAPF problems. It is trained using pure imitation learning on trajectories generated by LaCAM. (1/3)
PRL (Workshop) @ ICAPS 2024 *CALL* - If you're bridging the gap between AI Planning and Reinforcement Learning, join the PRL workshop - https://t.co/eyg9HWL6AF. Submissions due March 22
More details: https://t.co/duqOItivwN. Big thanks to my co-authors Anton Andreychuk, Maria Nesterova, Konstantin Yakovlev, and Aleksandr Panov.
The second paper, which I will detail after the camera-ready version, focuses on using Neural MCTS for the LMAPF tasks. (7/7)
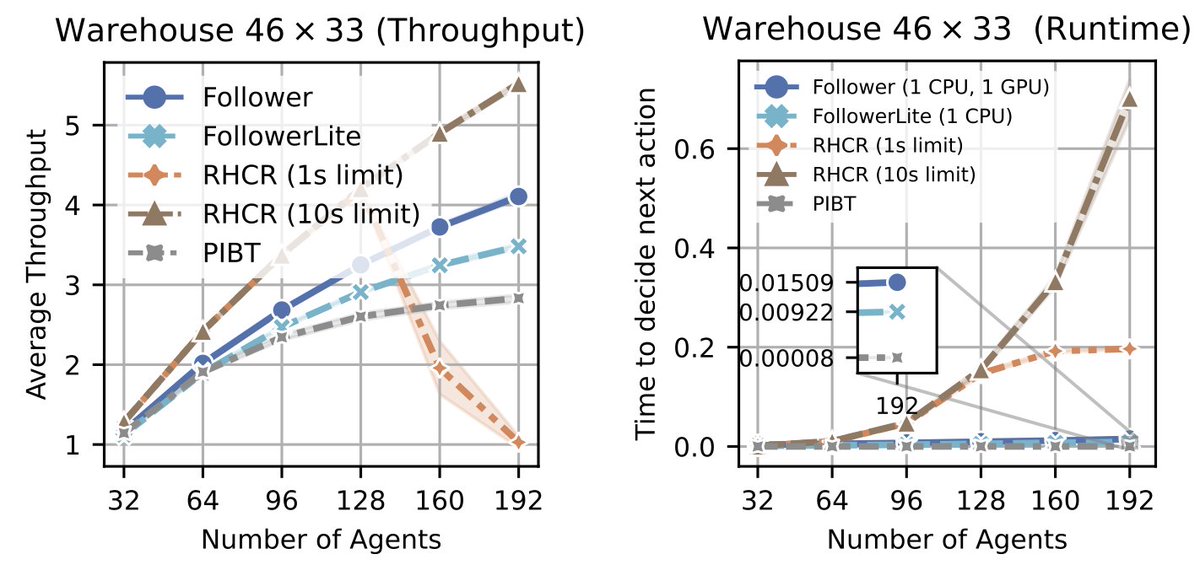
I'm excited to announce that two of my papers have been accepted at AAAI-2024, delving into lifelong multi-agent pathfinding (LMAPF) using RL and planning techniques. Here's the thread: (1/7).
Against centralized MAPF algorithms, Follower excels, especially under a strict 1-second time constraint in scenarios with a large number of agents (over 160 for the Warehouse map). (6/7)