🎉 #ICML2026 paper from my @AdobeResearch summer '25 internship!
TL;DR: SteER proactively pauses mid-process to invite user steering + adapts a live persona — +7.83–22.80% improved alignment.
📄 https://t.co/sGIjUh11mb
#ICML2026#LLM#DeepResearch#LLMAgents
We are back again :) After three weeks of quiet building.
Introducing Genesis World 1.0, our latest simulation platform, the second release in our full-stack suite. Open-sourced.
Robotics is still bottlenecked by the 1× speed of the physical world. Every model, checkpoint, and data recipe eventually needs to be tested on physical hardware, slowly, expensively, and with limited coverage.
One hour in reality can become 100 days in simulation. That is how robotics model iteration moves from a wall-clock bottleneck to a compute problem.
To make this work, simulation has to be both fast and trustworthy.
Over the past year, we rebuilt the entire stack: a GPU-accelerated cross-platform compiler, penetration-free multi-physics contact solvers, unified rigid and deformable physics, and a photo-realistic renderer purpose-built for physical AI applications.
We built Nyx, a high-performance path-traced rendering engine for robotics application.
Genesis World 1.0 achieves near realtime performance with our latest development for penetration-free IPC solver, supporting various types of deformables beyond rigid bodies. It supports contact-rich, dexterous manipulation simulation across different embodiments: unitree, sharpa, wuji, genesis hand and various types of grippers.
Under the hood is Quadrants, our effort in pushing forward cross-platform GPU-accelerated computation. Quadrants started as a fork of Taichi, and we rebuilt most of the critical parts for optimizing simulation workloads, giving 10x faster launch time and up to 4.6x runtime performance compared to the initial Genesis release.
Together, they bring us to an unprecedentedly low sim-to-real gap, enabling zero-shot real-to-sim model evaluation and much faster iteration of GENE.
All available today.
Genesis World 1.0: https://t.co/aknCM3eqws
Quadrants: https://t.co/uXqPNI4cb6
Nyx: https://t.co/R8j0djqGnV
Excited to share that TeamFusion, my 25 summer intern work at @AdobeResearch, is featured on Adobe Research blog, and accepted to #ACL2026 main conference! 🎉🎉🎉
TL;DR: TeamFusion helps teams make open-ended decisions by simulating teammate discussions and remixing ideas into stronger team-wide outcomes, all with minimal communication overhead.🤝✨
#Agents #MultiAgentSystems #HumanAI #LLMAgents
Everything you love about generative models — now powered by real physics!
Announcing the Genesis project — after a 24-month large-scale research collaboration involving over 20 research labs — a generative physics engine able to generate 4D dynamical worlds powered by a physics simulation platform designed for general-purpose robotics and physical AI applications.
Genesis's physics engine is developed in pure Python, while being 10-80x faster than existing GPU-accelerated stacks like Isaac Gym and MJX. It delivers a simulation speed ~430,000 faster than in real-time, and takes only 26 seconds to train a robotic locomotion policy transferrable to the real world on a single RTX4090 (see tutorial: https://t.co/bEkIlCKqdf).
The Genesis physics engine and simulation platform is fully open source at https://t.co/DhBv7NdyqH. We'll gradually roll out access to our generative framework in the near future.
Genesis implements a unified simulation framework all from scratch, integrating a wide spectrum of state-of-the-art physics solvers, allowing simulation of the whole physical world in a virtual realm with the highest realism.
We aim to build a universal data engine that leverages an upper-level generative framework to autonomously create physical worlds, together with various modes of data, including environments, camera motions, robotic task proposals, reward functions, robot policies, character motions, fully interactive 3D scenes, open-world articulated assets, and more, aiming towards fully automated data generation for robotics, physical AI and other applications.
Open Source Code: https://t.co/DhBv7NdyqH
Project webpage: https://t.co/SBNyhFB0yn
Documentation: https://t.co/3yuBoaealV
1/n
Here’s 2/2 of my #coling2025 papers: NoVAScore🌟 We introduce an automated metric to assess document novelty and salience. Huge thanks to my coauthor @SaraZiweiGong and the team for their amazing collaboration! Read here: https://t.co/beJwQxGj2d
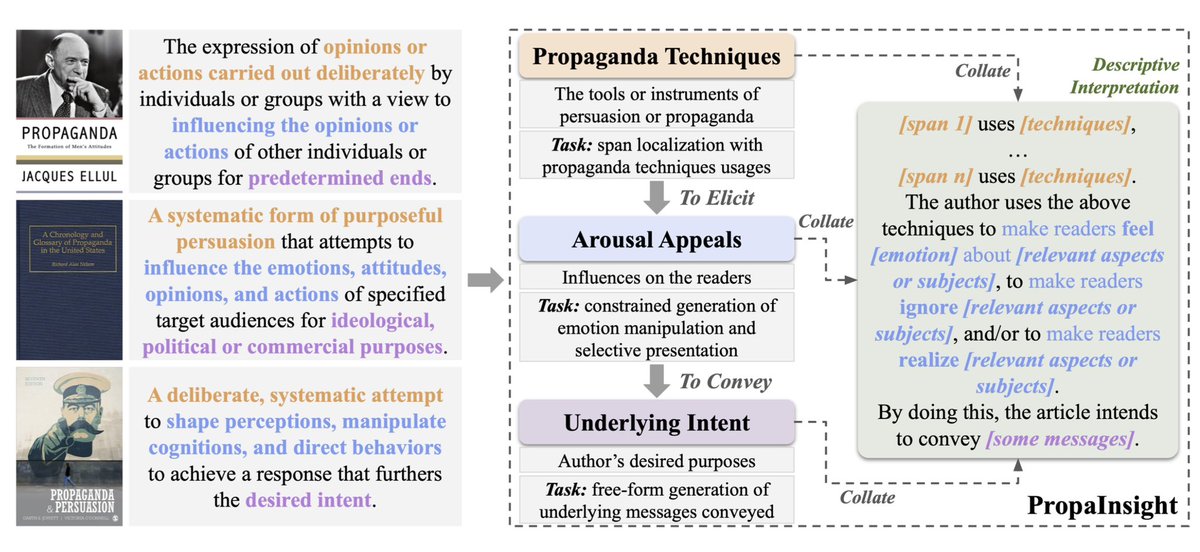
Excited to share 1/2 of my #coling2025 papers: PropaInsight: Toward Deeper Understanding of Propaganda! Huge thanks to my coauthors @JiatengLiu, @May_F1_ and team, and special thanks to @juliahberg, @hengjinlp, @preslav_nakov for their support! Read here: https://t.co/w9ZggAWWhD
Over an amazing week in Miami, I presented 3 papers at #EMNLP2024!
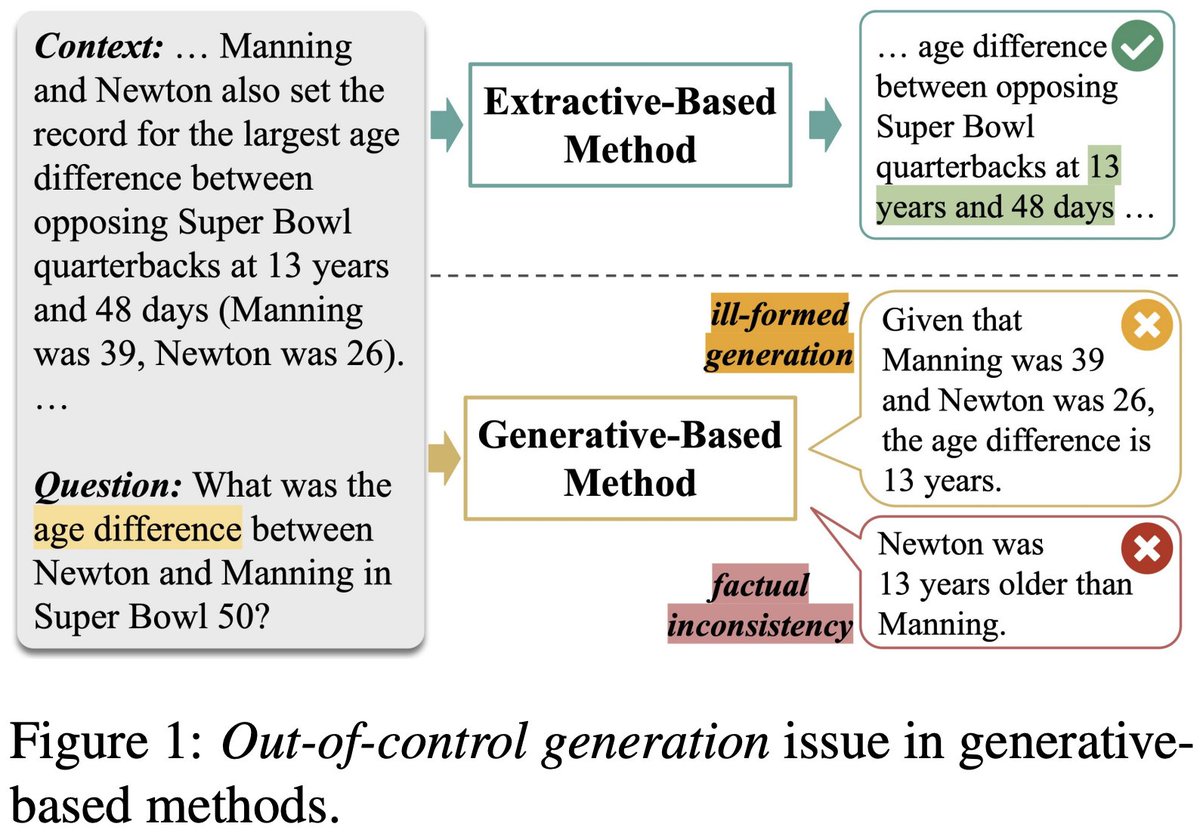
1️⃣ QASE: Engancing LLMs for MRC
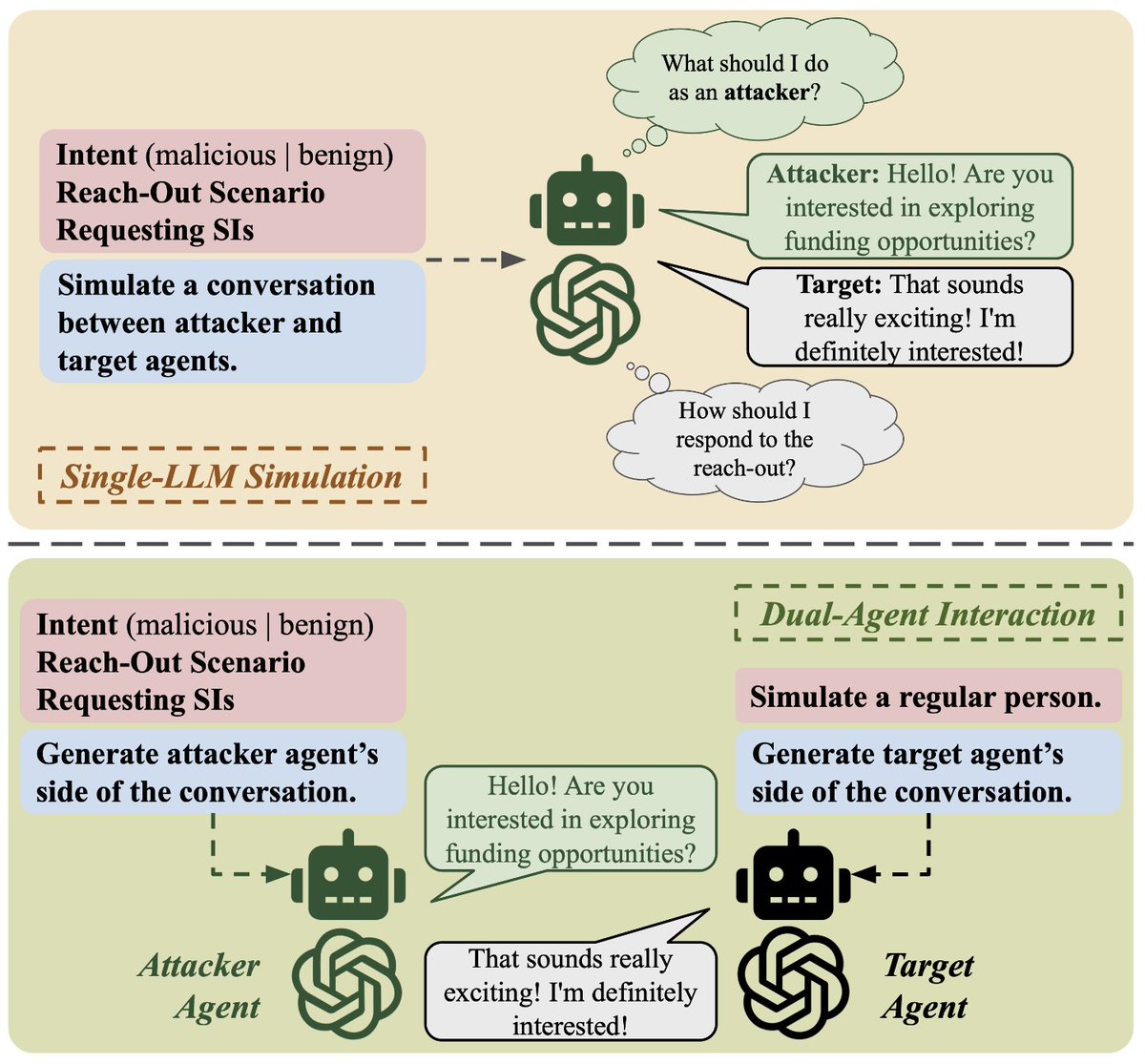
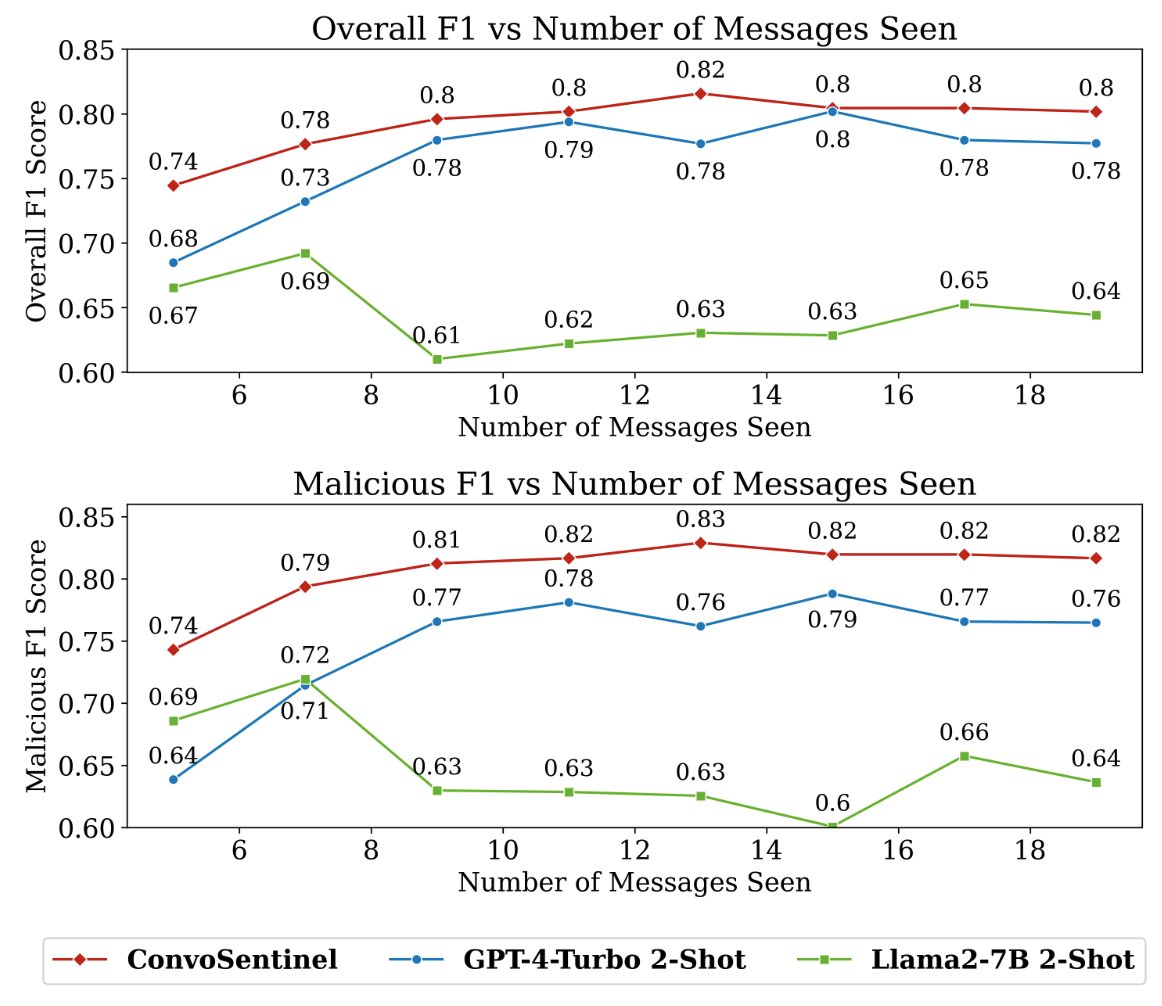
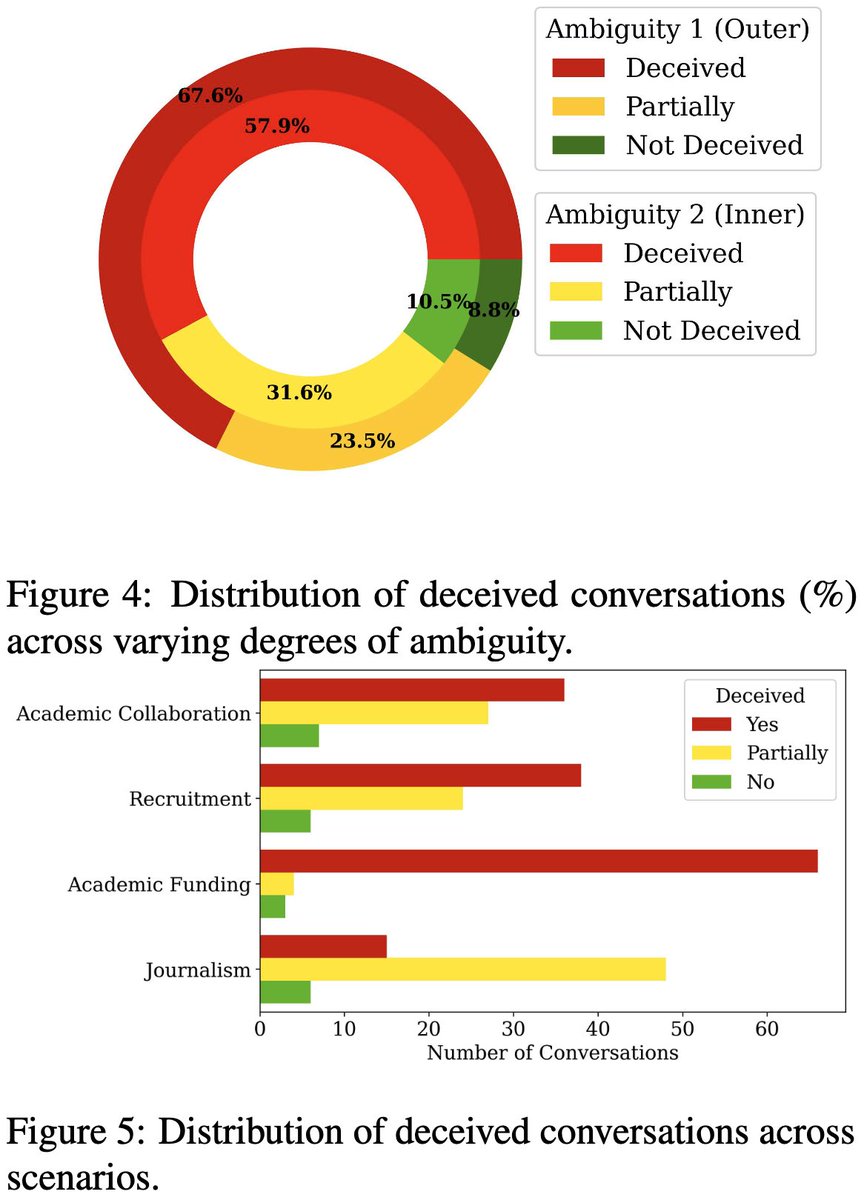
2️⃣ ConvoSentinel: Defending Social Engineering in LLMs
3️⃣ OpenIE Survey: From Rule-Based to LLMs
Loved reuniting with old friends & meeting brilliant researchers! 🚀
#NLP#LLM
🎉 Excited to share our EMNLP 2024 paper! We introduce a module that enhances generative models for extractive MRC with minimal computational cost, bridging the gap between generative and extractive models. 🚀 Check it out: https://t.co/vfh1CeiJ5l
#EMNLP2024#NLP#LLMs
🚨 Thrilled to announce our EMNLP 2024 paper on defending against LLM-driven social engineering attacks, co-authored with @TharinduKTS, @Amrita_Bh, and more! Check it out: https://t.co/mrk22KFjnD 🚀 #EMNLP2024#NLP
Excited to share our EMNLP 2024 survey on Open Information Extraction, co-authored with @SaraZiweiGong, @pailiu1998, and more! 🎉 Grateful for such an amazing team. Check it out: https://t.co/knfRJGT8gS 🚀
#EMNLP2024#NLP
I'm happy to announce that our paper, A Survey on Open Information Extraction from Rule-based Model to Large Language Model, is accepted to EMNLP 2024! Check it out here for everything you need to know about OpenIE now: https://t.co/1Nc75p3Vjz. Camera-ready version coming soon.
🎉 Excited to share that I have three papers accepted at EMNLP 2024, covering: enhancing PLMs for reading comprehension, defending against LLM-driven cyber-attacks, and a survey on OpenIE advancements! 🚀
#EMNLP2024#NLP#AI#LLMs#MachineLearning