Gonna try out imitation learning with lerobot, for now I've setup mujoco and a few helper functions, will look into forward and inverse kinematics tomorrow.
I've never had this much fun playing Elden Ring Nightreign with the boys, it's a peak game, but it's kinda disappointing that it's not getting updates anymore.
I've started playing a few mods and it's insane to see what modders can really do.
@ppok24 Yes its a node binary, there's react core components which is not web agnostic I think, and the react Dom for web renders, but for tui they use ink as the renderer
This week's focus
1. Finish the GPT-2 paper (read the BPE paper last week)
2. Complete my ROS2 UR5 simulation + sorting task
3. Figure out how to properly model Gymnasium environments
4. Hopefully get back to the gym (that minor injury slowed me down)
@itsabhiyan A single session of claude code might be 300+ mb and when you add mcp into the equation that's just crazy, shipping fast should be priority for any company but they gotta have a set of standards too fr
@itsabhiyan Honestly this is just bad engineering, and all companies and engineers accept it due to its popularity.
Javascript for everything isn't a joke anymore and now we have next js shipping with a compiler
@itsabhiyan From what i have gathered it's mostly because of the vast amount of data available on typescript so it's easy to vibe code and ship faster(claude-code, opencode etc)
The approach that codex took is way better, i guess its just poor decision of javascript frankenstein
We can finally retire the 'Java is too slow' meme.
It's 2026 and Netflix is running 3,000–4,000 production services on Java with near-zero GC pauses
Amazing talk!
https://t.co/pmRaH0KrmD
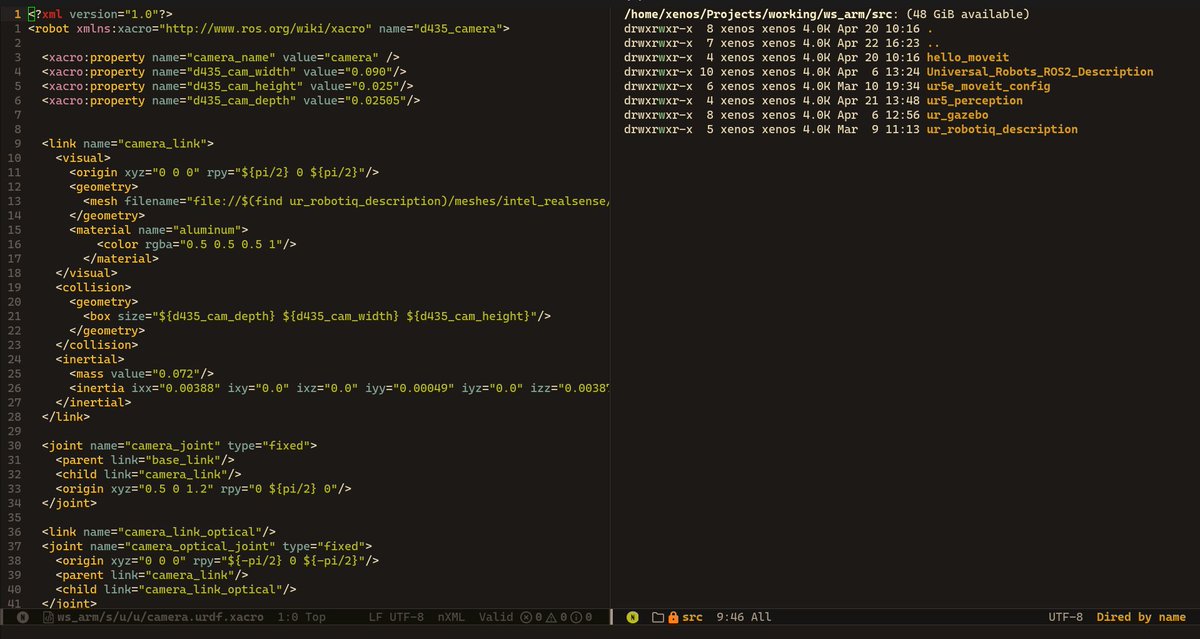
Fixed the issue. Turns out it was a Gazebo sim bug: camera_info follows the REP 103 standard, but point cloud generation in Gazebo sim doesn’t.
There are two possible approaches:
1. Use a additional frame to make it align with rep 103
2. Use depth_image_proc(i chose this one)























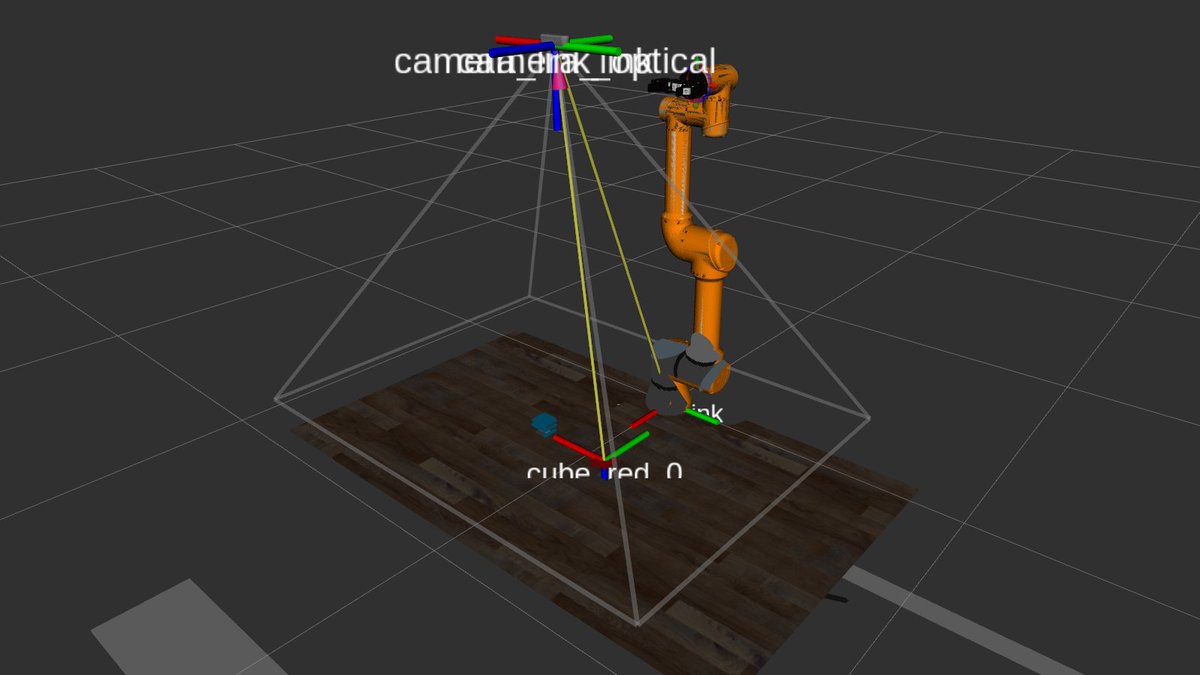
![azeus333's tweet photo. Okay i don't understand why this is happening, i set the camera according to rep 103(z forward[points to the scene], x right, y down) https://t.co/zAxgRhB3Wn](https://pbs.twimg.com/media/HGfxMIJbMAAhRjS.jpg)