Excited to introduce 𝗗𝗦𝗜𝗡𝗘! (#CVPR2024)
https://t.co/DaWRX8e8Mw
We push the limits of single-image surface normal estimation by rethinking the inductive biases needed for the task.
See you in Seattle!
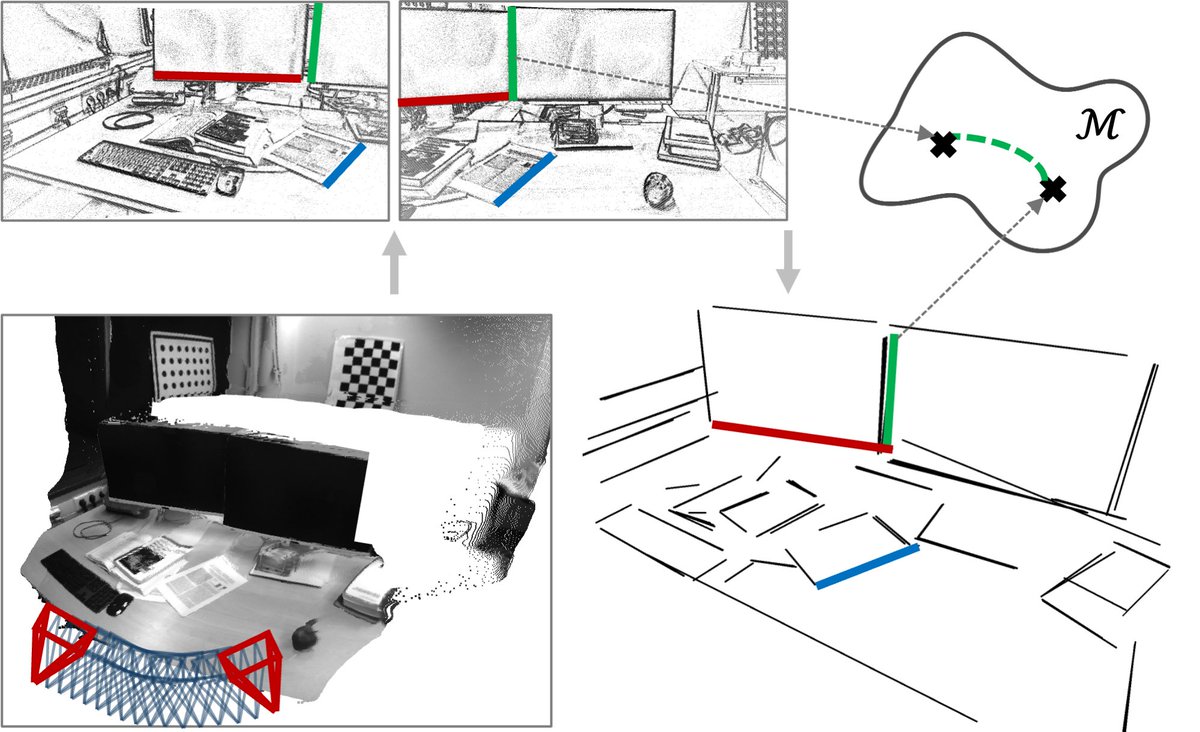
Excited to introduce RoEL, accepted to T-RO!
❓ What 3D representation to use for event-based reconstruction?
💡 Event cameras capture edges; we reconstruct them as 𝟑𝐃 𝐥𝐢𝐧𝐞𝐬.
We present a robust pipeline: from reliable correspondence search to Grassmannian optimization.
Just started Tesla Robotaxi drives in Austin with no safety monitor in the car.
Congrats to the @Tesla_AI team!
If you’re interested in solving real-world AI, which is likely to lead to AGI imo, join Tesla AI. Solving real-world AI for Optimus will be 100X harder than cars.
Super congratulations to the @Tesla_AI software & chip design teams on a successful @Robotaxi launch!!
Culmination of a decade of hard work.
Both the AI chip and software teams were built from scratch within Tesla.
Visual SLAM has made major success in static scenes — now let’s explore the dynamic world we live in!
At #CVPR2025, we introduce 4DTAM, 4D Tracking & Mapping using dynamic surface Gaussians optimized through diff. rendering.
https://t.co/IBQY1yyGNh
w/ @BaeGwangbin@AjdDavison
Introducing MASt3R-SLAM, the first real-time monocular dense SLAM with MASt3R as a foundation.
Easy to use like DUSt3R/MASt3R, from an uncalibrated RGB video it recovers accurate, globally consistent poses & a dense map.
With @eric_dexheimer*, @AjdDavison (*Equal Contribution)
COMO will be presented as an 𝐨𝐫𝐚𝐥 at #ECCV2024!
Also come see the 𝐥𝐢𝐯𝐞 𝐝𝐞𝐦𝐨 of our compact 3D representation for real-time monocular SLAM
Oral: Session 2C at 1:40 PM on Tue 1 Oct
Poster: #181 at 4:30-6:30 PM on Tue 1 Oct
Demo: Thurs 3 Oct AM
https://t.co/S3rKqVW8Pz
Dr Gwangbin Bae @BaeGwangbin delivered on a talk on "Always-on Perception for 3D Computer Vision" in the 27th BMVA Computer Vision Summer School in Durham University.
Our lab's #SpatialAI demo guidelines:
1. Build demos (real-time + good visualisations) *while* doing the actual research.
2. You learn more from 3 minutes with a live demo than any dataset results.
3. Show your demo to as many people as possible. Don't worry if it's not perfect.
On my way to London after an unforgettable week at #CVPR2024. It was my first in-person CVPR and I loved every moment of it. A big thank you to everyone who came to my talk/poster!
Reminder of the live demos of DSINE (real-time high quality normals) and SuperPrimitives (normals integrated into real-time monocular dense SLAM) in the demo session all day today at #CVPR2024.