We’re going all in on World Models.
Today we’re launching the 1X World Model Lab.
The bet is simple:
You can’t fine-tune your way to AGI.
And you definitely can’t fine-tune your way to robots that can operate in the physical world.
General-purpose humanoids need models that understand space, motion, objects, causality, affordances, physics, and action before they ever see a specific task.
The frontier is not better VLA wrappers.
The frontier is embodied world models.
The 1X World Model Lab will focus on large-scale embodied world model pretraining: building the most generalizable foundation model for humanoid robots from the ground up.
The next frontier in AI requires scaling:
web-scale media + egocentric human videos + sim + dexterous remote operated robot data + on-policy NEO data → real-world deployment for robot data collection and RL → abundance of data → physical AI
The robot collects data.
The model gets better.
The robot gets better.
Repeat.
To lead this, we brought in one of the best for the mission: @_sam_sinha_ , as Head of World Models.
Sam was a founding research scientist at Luma AI and has been at the frontier of scaling multimodal generative video models his whole career.
If you’re the best in the world at large-scale pretraining, video models, robotics, RL, infra, or data — and you want your models to move atoms, not just pixels — join us.
Send background + evidence of exceptional ability to:
[email protected]
We’re building the model that makes autonomous labor real.
AGI without hands is just a ghost.
The brain gives absurd real-estate to hands, intelligence needs contact with reality
NEOs hands are fully capable accurate sense/act across force/pressure/shear/texture at human speed and strength
https://t.co/1N3GBbGj2C
The cool thing about talking with Bernt is that he isn’t just a robotics CEO, he’s a deep AI thinker who’s been obsessed with this for decades.
It's obvious to me that this is his life's purpose.
While most robotic labs are chasing narrow, pre-programmed behaviors, 1X built a dynamics-first world model trained on video + robot sensors.
It lets NEO generalize to completely new tasks out of the box, and get smarter through every failure - the same way humans do.
Bernt says NEO doesn’t need to have seen every chore. It needs a World Model with enough human experience to imagine what should happen, a body dexterous enough to attempt it, and a real-world feedback loop sharp enough to correct it.
That’s how we go from task automation to general-purpose labor.
Stop strategizing so much
Stop setting so many plays in motion
Stop doing things only based in fear
Act in love and the universe will come to your side
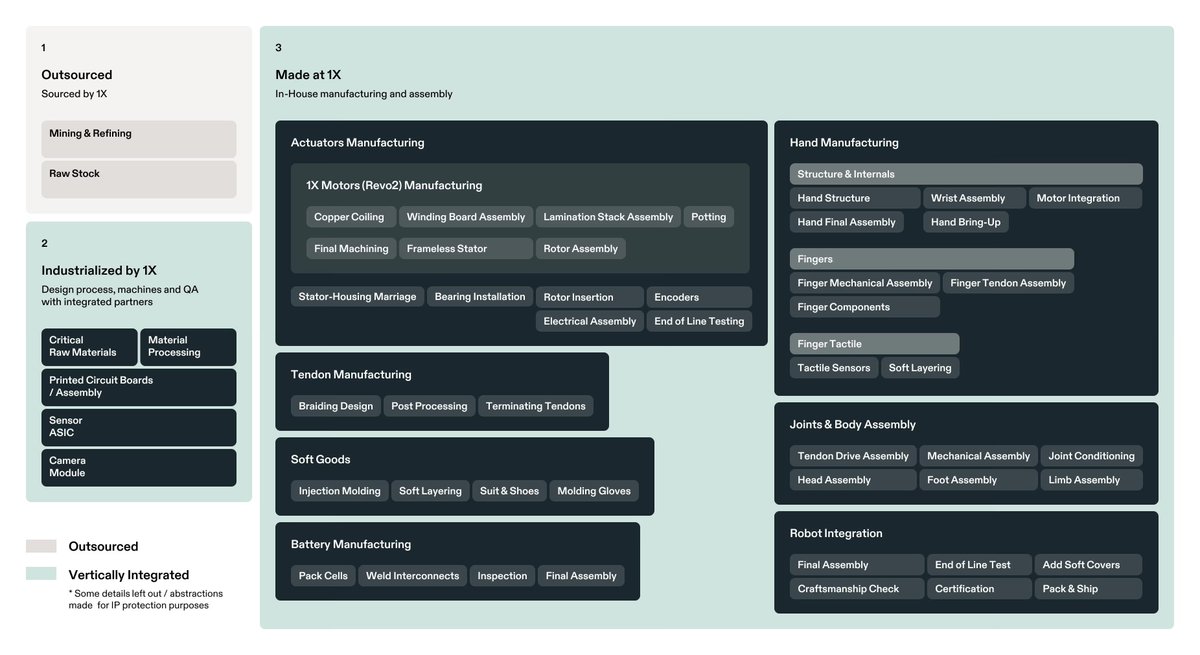
Vertical integration should be auditable
So 1X is committing to supply-chain transparency as we move toward true end-to-end vertical integration — raw materials to intelligence.
We’ll show our work. Others should too
Assembly is not vertical integration
1X bends the copper, solders the phases, potts the stator and builds the magnet arrays. Raw materials to finished actuators on our automated line.
That is vertical integration. That is reindustrialization
Introducing NEO Factory | Hayward, CA
Scaling manufacturing was always the plan- but after receiving 10,000+ preorders in the first 5 days, we accelerated everything to urgently increase production capacity to fulfill demand.
In just 3 months we built America’s most vertically integrated humanoid robot factory, right here in the Bay Area.
I do think it's kinda fun that everyone is shitting their pants about how America can't do actuators & 1X has the cheapest & most performant actuators in the world by orders of magnitude... and we're an American company manufacturing our actuators in-house...