The next big jump in robot learning may not be bigger vision models.
It may be touch.
HapTile shows that adding tactile input to VLA policies can turn peg insertion from 0% → 90% success.
Robots don’t just need to see the world.
They need to feel it.
https://t.co/Pprta00o7u
#AI #MachineLearning #Robotics
@NivaPlatforms@hbouammar hi, no it doesn't infer the shape of apple, and it doesn't really "practice", we use several previous experiences, and select the most relevant to help improve the performance
There is a new robotic revolution in terms of hardware! Yet, robotics software stagnated at ROS for some reason. While ROS is what people are using, it presents a significant hurdle for many of us in the ML field to get started (interfacing with the hardware, C/C++ 🤯 ).
Well, we want to change that! Welcome to the new generation of robotics software, based on Python! Yep, Python! So you can pip install robotics!!
The paper is coming to arxiv, but as usual, my LinkedIn followers get a first view first, so have a read through the paper (https://t.co/9HAadIgb5r)!
We are opening it step by step to allow feedback and engagement, please star our repos: https://t.co/RfnffNYuY7
🚀 Meet Ark – a Python-first, open-source framework that finally lets ML engineers and roboticists speak the same language. One pip install, no labyrinthine C++ build chains.
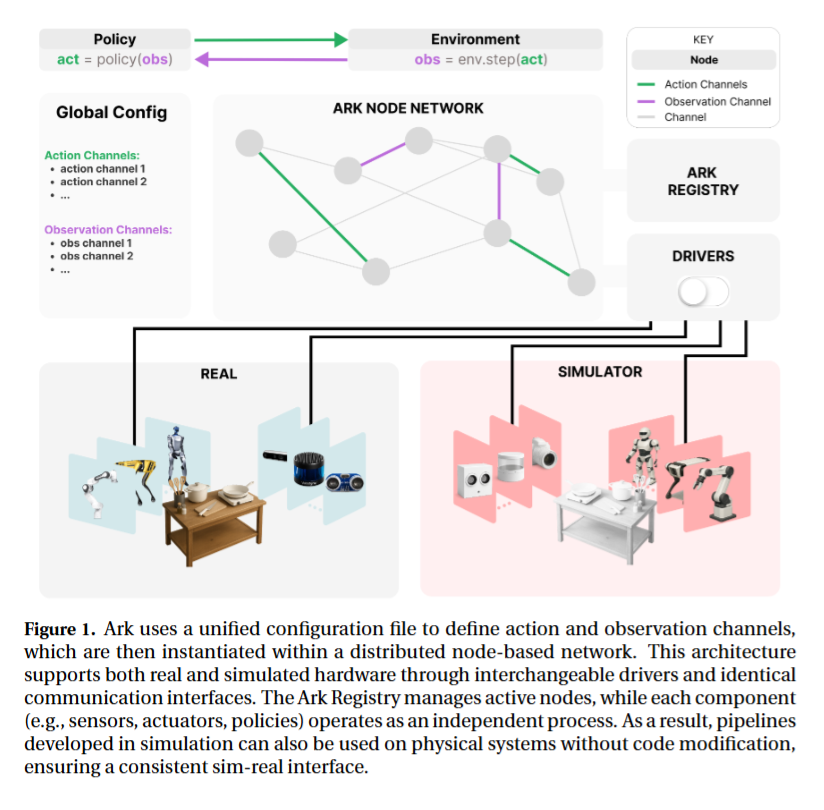
🔄 One flag = sim-to-real. Toggle sim: True/False in a YAML file and run the exact same policy on PyBullet/MuJoCo or physical hardware – no code rewrites, no ROS launch-file plumbing.
🧩 Node-based, LCM pub-sub architecture means sensors, policies, and controllers are hot-swappable processes. Hack, crash, or iterate without taking the whole stack down.
📦 Built-in data & debugging tools – LCM logger/player, real-time plots, graph viewer, and camera streams – slash time spent on “why is my topic empty?” detective work.
🏋️ Out-of-the-box imitation-learning pipelines (Diffusion Policy, ACT) with reusable data-collection nodes (VR, gamepad, kinesthetic). RL integration is next on the roadmap.
🤝 Interoperates, doesn’t dictate – optional ROS bridge, clean C/C++ bindings for real-time loops, and a backend API that can host any simulator or custom driver.
🗺️ SLAM → Planning → Control modules included: Fast-SLAM mapping, A* path planning with safety margins, PD waypoint tracking – demoed on a Husky in a kitchen maze.
🤖 Case studies: ViperX pick-&-place, A1 humanoid cloth folding, language-conditioned board-game play via DeepSeek-R1, mobile inspection – all reproducible from provided configs.
👉 Call to action: Check out the repo, try Ark on your lab robot this week, and let us know what you build!
#AI #Machinelearning #Robotics #roboticsurgery #ycombinator #Robot