November 2023. The most powerful companies on Earth lined up to make him kneel.
Disney. Apple. IBM. Comcast. They pulled their money and waited for the apology.
The whole press corps wanted one word out of him. Sorry.
Sorkin leaned in and offered him the exit. Just walk it back.
Musk: “If somebody’s going to try and blackmail me with advertising, blackmail me with money, go fuck yourself.”
No retraction. No cleanup post at 2am. No quiet calls begging the brands back.
They wrote that it was over. That he’d finally buried his own company.
He was worth around $230 billion that night.
This week SpaceX went public.
He became the first trillionaire who has ever lived.
Forbes puts him at $1.1 trillion. Almost four times the next richest person alive.
This was never about him.
The people threatening you only hold the power you agree to hand them.
Every time you apologized to keep the peace, you taught them the price was you.
He refused to pay it once, in front of the entire world.
The world blinked first.
The crowd never remembers who knelt. It remembers who refused to flinch.
The only person who can ever make you beg is you.
I think possibly the best thing about Elon Musk becoming a trillionaire is how angry it makes a bunch of losers who've never built a thing in their lives.
Elon Musk just revealed what’s actually holding AI back.
It’s not chips. Not models. Not data.
It’s concrete.
Someone asked him the obvious question. Why not just build private power plants next to data centers? Bypass the grid entirely.
His answer was four words.
Musk: “The power plant makers.”
There aren’t enough of them.
You can design the best chip on earth. Train a frontier model. Raise $10 billion for a hyperscale data center.
None of it matters if you can’t power it.
Musk: “You can drill down a level further.”
GPUs need power. Power needs turbines. Turbines need factories. Factories need permits. Permits need a government that hasn’t paralyzed itself.
Every link in the chain is physical. And every one of them is breaking.
We can train a frontier model in weeks. We can’t permit a power plant in under five years.
The country that invented the assembly line now needs 40 agencies to approve a gas turbine.
China doesn’t have this problem. They don’t run 7-year environmental reviews on infrastructure they need tomorrow. They break ground while America requests approval to break ground.
The AI race won’t be decided by whoever writes the best algorithm.
It’ll be decided by whoever can still build in the physical world.
We spent 30 years getting faster in software and slower in steel. Outsourcing manufacturing. Hollowing out supply chains. Treating builders like liabilities instead of assets.
Now the bill is due.
Every breakthrough in AI is gated by atoms. Steel. Concrete. Turbines that take years to manufacture and decades to approve.
The smartest code on earth is worthless without electricity.
Musk didn’t give a speech about this. He didn’t need to. He answered one question and the whole infrastructure myth collapsed.
“Where do you get the power plants from?”
Follow that thread far enough and you stop finding a technology problem.
You find a civilization that mastered thinking and forgot how to build.
Trail assist mode engaged to go down a steep section of Hell’s Revenge, Moab Utah. Super special Thank You 🙏🏼 to @kneubuehl for being the best Cybertruck off-roading guide and creating very special memories for many new friends ❤️
SpaceXAI and @cursor_ai are now working closely together to create the world’s best coding and knowledge work AI.
The combination of Cursor’s leading product and distribution to expert software engineers with SpaceX’s million H100 equivalent Colossus training supercomputer will allow us to build the world’s most useful models.
Cursor has also given SpaceX the right to acquire Cursor later this year for $60 billion or pay $10 billion for our work together.
Did xAI just mass-murder the entire voice AI industry? 🤯
Grok just launched two voice APIs. Speech-to-Text and Text-to-Speech.
Built on the same stack powering Tesla cars and Starlink support.
And priced at 10x cheaper than ElevenLabs.
Speech-to-Text: $0.10/hr batch. $0.20/hr streaming.
Text-to-Speech: $4.20 per million characters.
25+ languages. Real-time streaming. Speaker diarization.
Already outperforming ElevenLabs, Deepgram, and AssemblyAI on word error rate.
TTS ships with expressive tags like [laugh], [sigh], <whisper>, <emphasis>.
Voices that don't sound like robots reading a script.
ElevenLabs spent years building a voice AI company.
xAI built voice AI for cars and satellites.
BREAKING 🚨 TESLA HAS FINALLY SOLVED THE HARDEST PROBLEM IN ROBOTICS: UNVEILING THE 25-MOTOR ECOSYSTEM BEHIND THE 22-DOF OPTIMUS HAND 🖐️
Nature spent millions of years perfecting the human hand. Recreating it is widely considered the hardest problem in robotics, but Tesla engineers decided to tackle it in just a few years. They quickly ran into a massive physics problem. If you put all the motors needed for true human dexterity directly inside a robotic palm, the hand becomes a heavy, unusable club.
To give Optimus a revolutionary 22 degree of freedom hand, one that can delicately crack an egg while still having the grip strength to swing a sledgehammer, Tesla had to rethink robotic anatomy from the ground up.
They did this by turning the robot forearm into a high density engine room, housing a 25 motor ecosystem that allows the hand itself to remain incredibly light and nimble like a biological puppet. We finally have a clear look at how they pulled off this packaging miracle.
A newly published quartet of patents from April 16, 2026, rips the synthetic skin off the Optimus arm to reveal the integrated mechanics inside. Tucked within filings WO 2026/080690, WO 2026/080691, WO 2026/080693, and WO 2026/080701 are the secrets to the staggering motor array, a hollowed out wrist joint, and flexible artificial ligaments that prove Tesla has successfully translated human biology into a mass manufacturable machine.
To understand how they pulled this off, we have to look at the big picture.
⚖️ The problem: Packaging complex actuation into a human sized arm
Building a robotic hand with human level dexterity requires dozens of actuators and a massive network of control cables. The core problem is that putting motors directly inside the hand makes it far too heavy and bulky to perform normal human tasks.
Moving all those motors into the forearm solves the weight issue but creates a domino effect of new engineering nightmares. You have to figure out how to fit dozens of motors into a small cylinder, how to route all their cables through a moving wrist joint without pinching them, and how to build fingers that can handle the tension without snapping.
💡 Tesla's solution: An integrated biomechanical ecosystem
Tesla solved this by treating the entire lower arm as a single interconnected biomechanical system. Rather than designing the hand, wrist, and forearm in isolation, these four patents show a unified architecture where every component is specifically designed to support the others.
The best place to see this unified design in action is right at the fingertips. Before you can pull a finger, you have to build a joint that will not break under pressure.
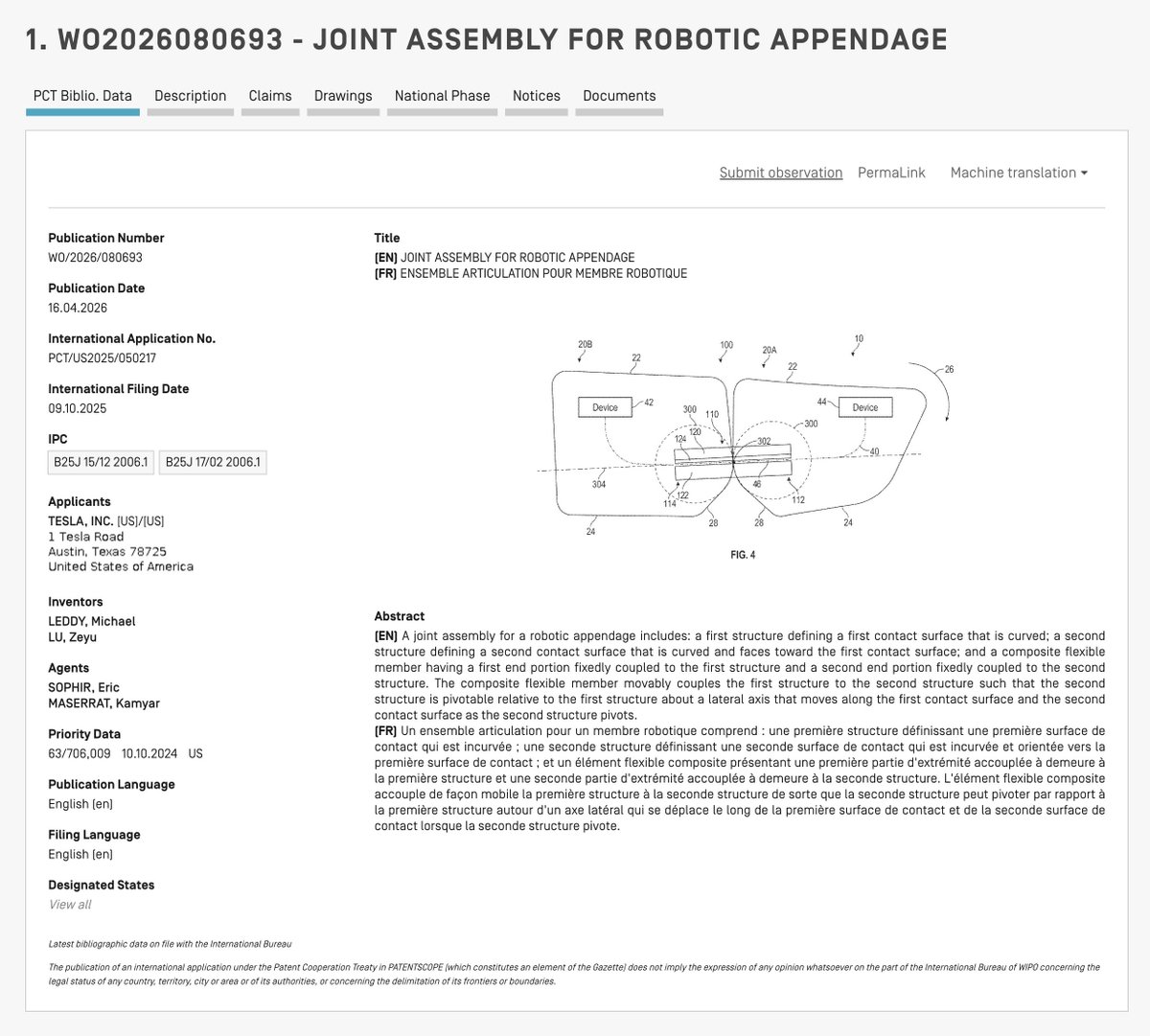
1⃣ Patent 080693: Solving the problem of fragile robotic joints
The problem here is that traditional robotic pin joints are rigid and snap easily under impact. Furthermore, routing electrical wires through moving joints causes the wires to bend and eventually break from metal fatigue.
The solution is an artificial ligament system that mimics human anatomy. Tesla created composite flexible members using elastomeric layers, which are essentially high tech rubber pads, that sandwich a high strength core.
The patents specify using materials like liquid crystal polymer fabrics, such as Vectran, or superelastic metals like Nitinol. Nitinol is a unique metal alloy that can bend drastically and snap back to its original shape without taking damage.
These materials achieve tensile strengths over 895 megapascals. This means a thin strip could withstand a massive pulling force equivalent to holding the weight of several cars. These ligaments allow the finger bones to roll smoothly against each other while preventing them from twisting or pulling apart.
The artificial ligaments are not a one size fits all solution. The patent specifies that these flexible members get physically thicker the closer they are to the palm. Because the base of the finger experiences exponentially more force than the fingertip, the base ligaments are beefed up to prevent tearing.
Furthermore, extreme versions of these joints do not just use three layers. They use a massive seven layer sandwich of alternating rubber and metal to guarantee they never snap under heavy loads.
To protect the internal wiring, Tesla routed the electrical harness straight through the neutral bending plane of the ligament. If you bend a thick paperback book, the pages on the outside stretch and the pages on the inside bunch up, but the exact middle layer experiences zero change in length.
By embedding the data cables right in this neutral zone, the wires experience zero stretching or compressing during movement.
Furthermore, the outer elastomeric layers are tuned to a specific hardness under Shore 60A. This is a measurement of rubbery stiffness roughly equivalent to a sturdy shoe sole. This specific density allows the rubber to act as passive springs that naturally bias the fingers back to an open, extended position when tension is released.
Having designed an indestructible finger joint, the engineers had to connect these fingers to a power source. This led them straight to the next major bottleneck, which was the wrist.
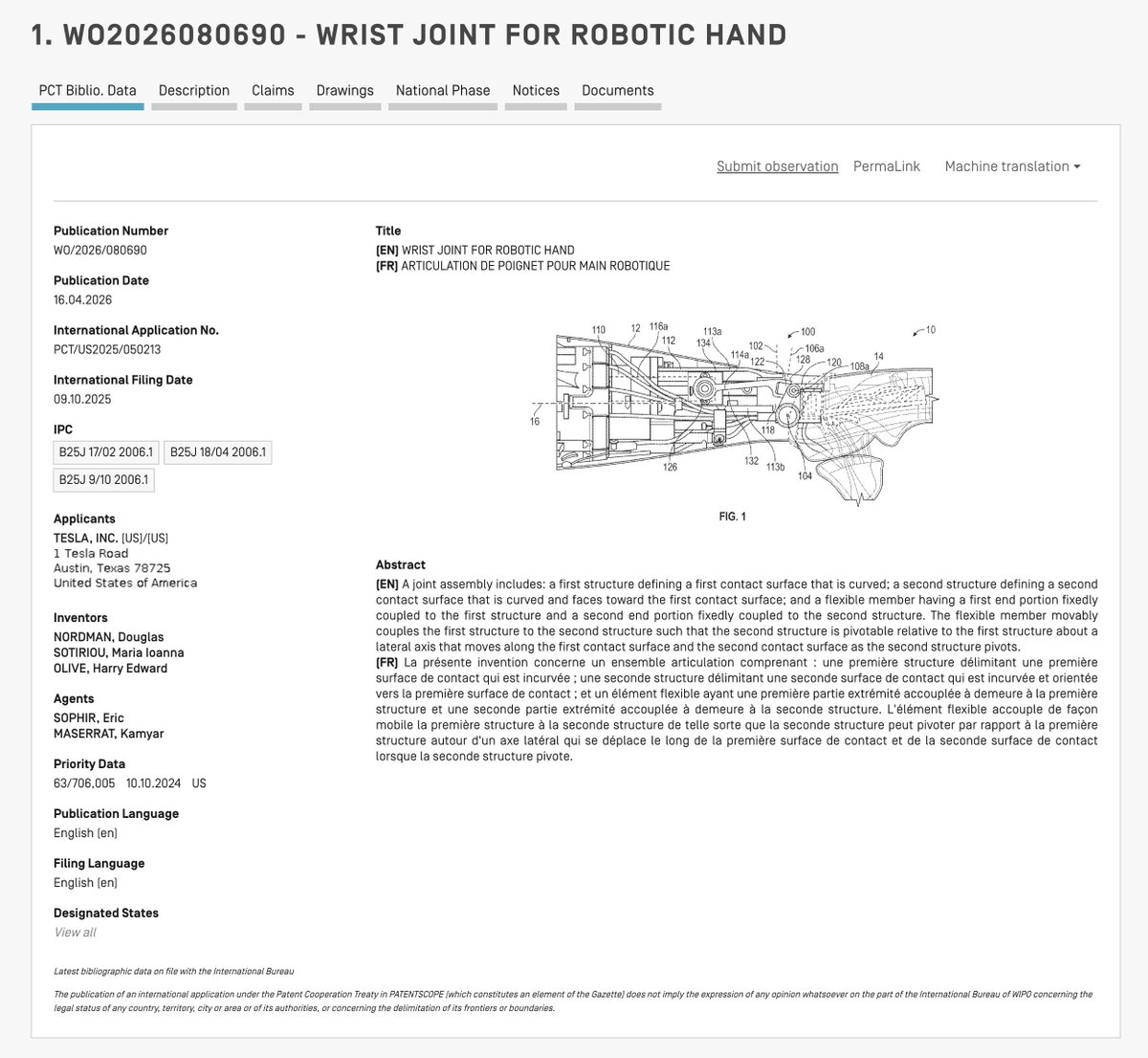
2⃣ Patent 080690: Solving the problem of crowded wrist pathways
The problem with moving all the finger motors to the forearm is that you now have over twenty cables that need to cross the wrist joint into the hand. Traditional robotic wrists use central pivots or dense gearboxes that completely block this pathway.
The solution is a brilliantly engineered cantilevered wrist joint. Tesla built a universal joint that hangs from the top and bottom of the forearm bracket in a cantilevered arrangement. This means it is supported entirely at the outer edges, much like a diving board or a balcony projecting from a building.
By using two dedicated linear actuators guided by precision sliders on a central track, they created a massive hollow void right down the center.
To save even more space, the connecting links use uniquely curved shapes. These metal links act like boomerangs. They intentionally bow sharply outward away from the center of the arm, and then swoop drastically back inward to attach to the hand.
This highly specific geometric curve is what allows the wrist to bend to extreme human angles without the metal links colliding with the central forearm bracket.
They even carved a specific notch directly into the hand structure. This allows the metal forearm bracket to recess into the palm so the wrist can bend further backward. This layout guarantees the dense bundle of finger tendons can pass safely into the palm no matter how the wrist moves.
With a safe, hollow highway established through the wrist, the team could finally focus on the powerhouse of the arm. They had to figure out where the actual pulling force was going to come from.
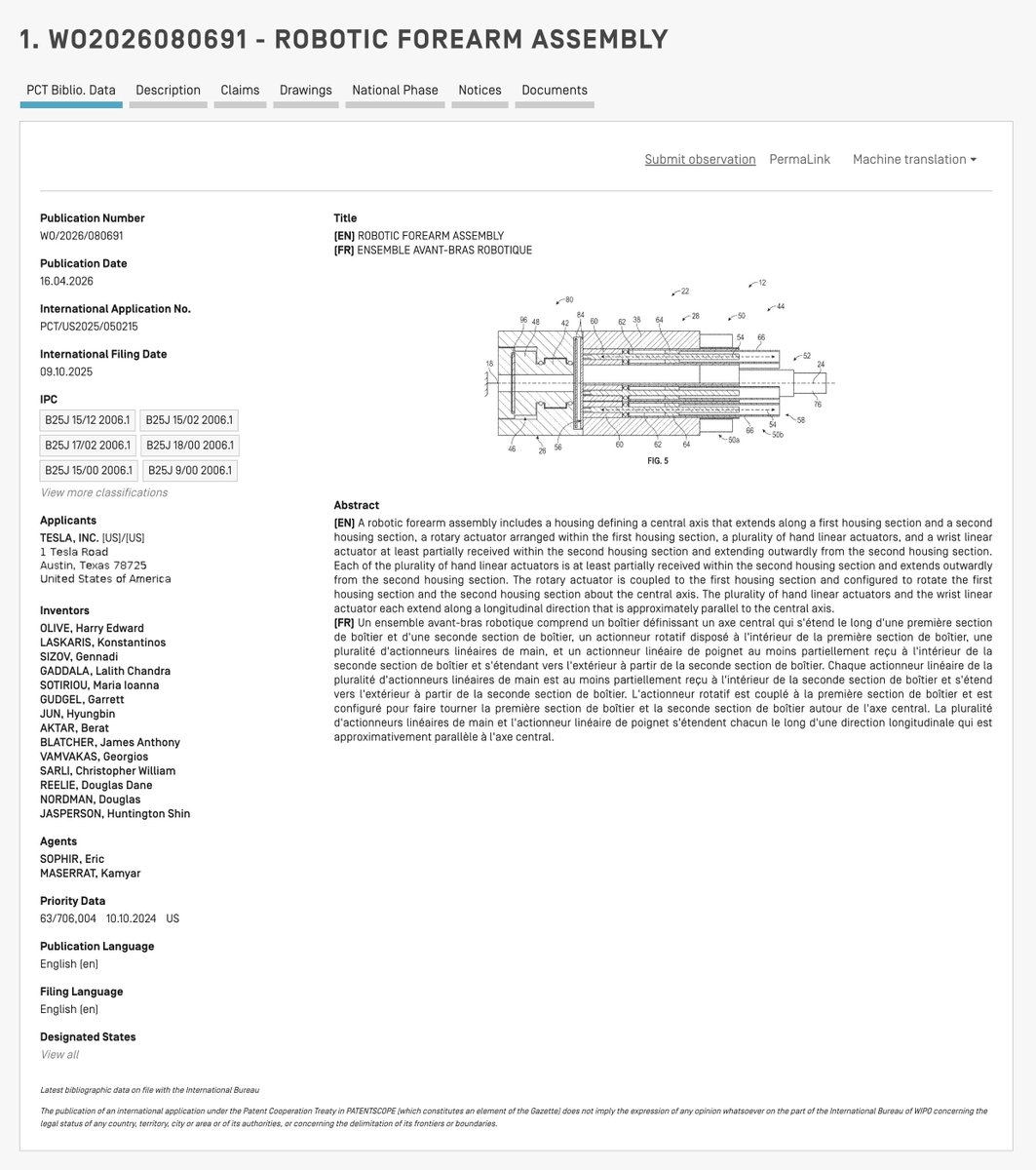
3⃣ Patent 080691: Solving the problem of actuator density
The problem is the sheer lack of physical space. To get twenty two degrees of freedom in the hand plus wrist movement, you need a massive number of motors. In robotics, a degree of freedom simply means an independent direction a joint can move. A human sized forearm is simply too small to house traditional robotic actuator setups without severe overheating and magnetic interference.
The solution is an extreme high density cylindrical packaging layout. Tesla split the forearm housing into sections, placing a rotary motor for wrist roll in the back to twist the wrist like turning a doorknob.
In the front section, they packed exactly twenty five linear actuators. Unlike standard motors that just spin in a circle, linear actuators push and pull in a straight line like pistons. Twenty three of these are tiny twelve millimeter motors for the fingers, and two are twenty millimeter motors for the wrist.
They placed these actuators in a staggered, circumferential pattern, forming a tight circle parallel to the arm bone. By nesting them in inner and outer rings, Tesla maximized space efficiency while allowing enough airflow for cooling.
They solved the cable tangling issue with an axially staggered layout. Much like the pipes on a church organ, the twenty five linear actuators terminate at completely different lengths. By staggering exactly where each motor ends, Tesla ensured the physical cable attachment points do not crowd each other in the tight cylindrical space.
They even packed the printed circuit boards and inverters internally. This makes the forearm a completely standalone, plug and play unit that only requires external power.
The muscles were successfully packed in the forearm, the highway through the wrist was clear, and the finger bones were ready to move. The final piece of the engineering puzzle was connecting it all together into a working puppet.
4⃣ Patent 080701: Solving the problem of complex finger control
The problem is figuring out how to translate the pulling force from the forearm motors into delicate, independent movements for each finger phalanx, which is the technical term for the individual bone segments in a finger. Attempting to do this without filling the hand with bulky mechanical linkages is incredibly difficult.
The solution is a highly refined tendon driven network controlling twenty five distinct degrees of freedom. Tensile members run from the forearm, through the hollow wrist, and anchor to specific finger bones.
While a thumb that swings inward is standard, the Optimus hand features a fully opposable pinky with its own dedicated opposition joint and motor. This allows the entire hand to dynamically cup inward, which is essential for gripping spherical objects like baseballs or doorknobs.
Tesla uses active pull for flexion, meaning the motors tug the cables to close the fingers or squeeze them together. Additionally, while closing a finger uses one cable and opening it uses a passive spring, spreading the fingers side to side requires active control. Tesla solved this by using two opposing cables per finger, allowing them to splay outward with absolute precision.
To prevent over extension, they built physical hyperextension hard stops directly into the artificial bones. These act like door hinges that physically block the finger from bending too far backward and snapping.
Finally, to give the hand a sense of touch, Tesla embedded tactile and position sensors throughout the phalanges. They routed their delicate cables safely alongside the flexing axes to prevent strain.
These four systems do not just work in isolation. They form a complete loop of motion that brings the robot to life.
🚀 How this patent suite contributes to Tesla's Optimus program
Individually, each of these patents represents a clever mechanical workaround. Together, they form the exact engineering blueprint for the highly anticipated Optimus V3.
Right now, this integrated tendon driven architecture is the secret behind Optimus V3 making a massive leap to a 22 degree of freedom hand. This effectively doubles the 11 degrees of freedom seen in the Gen 2 prototypes. By routing the cables efficiently through the wrist's neutral axis, they avoid twitchy cable crosstalk, ensuring that pulling one tendon does not accidentally tug on a neighbor. This exact hardware allows V3 to execute over 3,000 discrete tasks, seamlessly transitioning from delicate household chores, like folding laundry or handling eggs, to heavy industrial assembly using Tesla's advanced AI5 chips.
Looking to the future, this unified design is the cornerstone of Tesla's ultimate goal for Optimus V4, V5, and beyond: unprecedented mass production. Actuators and sensors dominate the build cost of any humanoid. By removing fragile, expensive gearboxes from the hand itself and relying on centralized forearm linear actuators with passive spring returns, Tesla has engineered a system that minimizes part counts and is vastly cheaper to assemble.
As Tesla pushes to scale production at their Fremont factory, their eyes are set on a long term target of a $20,000 build cost and a million units per year. Future iterations like V4 and V5 will likely lean even harder into this integrated tendon approach, further optimizing the artificial ligaments and reducing supply chain complexity.
This patent suite proves they are not just building a cool lab prototype. They are building an economic weapon, a mass manufacturable robotic worker designed to fundamentally replace human physical labor and completely redefine Tesla's future beyond cars.
I always dreamed to make proper hard sci-fi.
It been around my head for years - to bring life to new universe with predicting-the-future approach. And, of course, add something new to the genre as I did with Tarkov.
Now my life has become twice as difficult. I decided to rush in with the thought: what if more time passes and I no longer can or want to do anything new?
Frago is being developed by separate company that I created, full of great ppl around the globe.
Escape from Tarkov is my life and I'm continue working on it too with my BSG family no matter what.
Tarkov for life.
Frago is the new adventure that I want to share with you.
Thank you for your support and long live hardcore!
This is the awareness gap problem applied to space and it’s identical to the one I deal with in health every single day.
The most important thing happening is the thing nobody knows about.
Four humans are about to fly farther from Earth than any human has ever traveled. The spacecraft, the medical screening, the physical and psychological preparation these astronauts have undergone to qualify for this mission is the most comprehensive health evaluation most people will ever hear about. These four passed a battery of testing that makes a standard annual physical look like a pop quiz. VO2 max. Full cardiovascular workup. DXA body composition. Complete metabolic panels. Endocrine profiles. Psychological evaluation. Every system in their body verified and re-verified before they’re allowed to sit in that capsule.
And most people don’t know it’s happening.
Same thing happens at the doctor’s office. The fasting insulin test exists. Catches metabolic dysfunction a decade before glucose moves. Costs $15. Most people have never heard of it. ApoB exists. Counts the particles actually driving atherosclerosis. Most people don’t know it’s a test they can request. hsCRP exists. Measures the inflammation that’s slowly driving the chronic disease most people will eventually be diagnosed with.
The tools exist. The awareness doesn’t.
Four people are going to the moon because they were screened at a level most humans will never experience. Meanwhile 93% of American adults are metabolically unhealthy and most of them have never had a comprehensive panel.
We should be stoked about Artemis. We should also be stoked about the fact that the screening technology those astronauts benefited from is available to every one of us right now. Nobody’s flying us to the moon. But the lab work that cleared them for the mission is the same lab work that could change your health trajectory this month.
Don’t wait for the diagnosis.
Read the label.