Decentralised Robotics 🧵
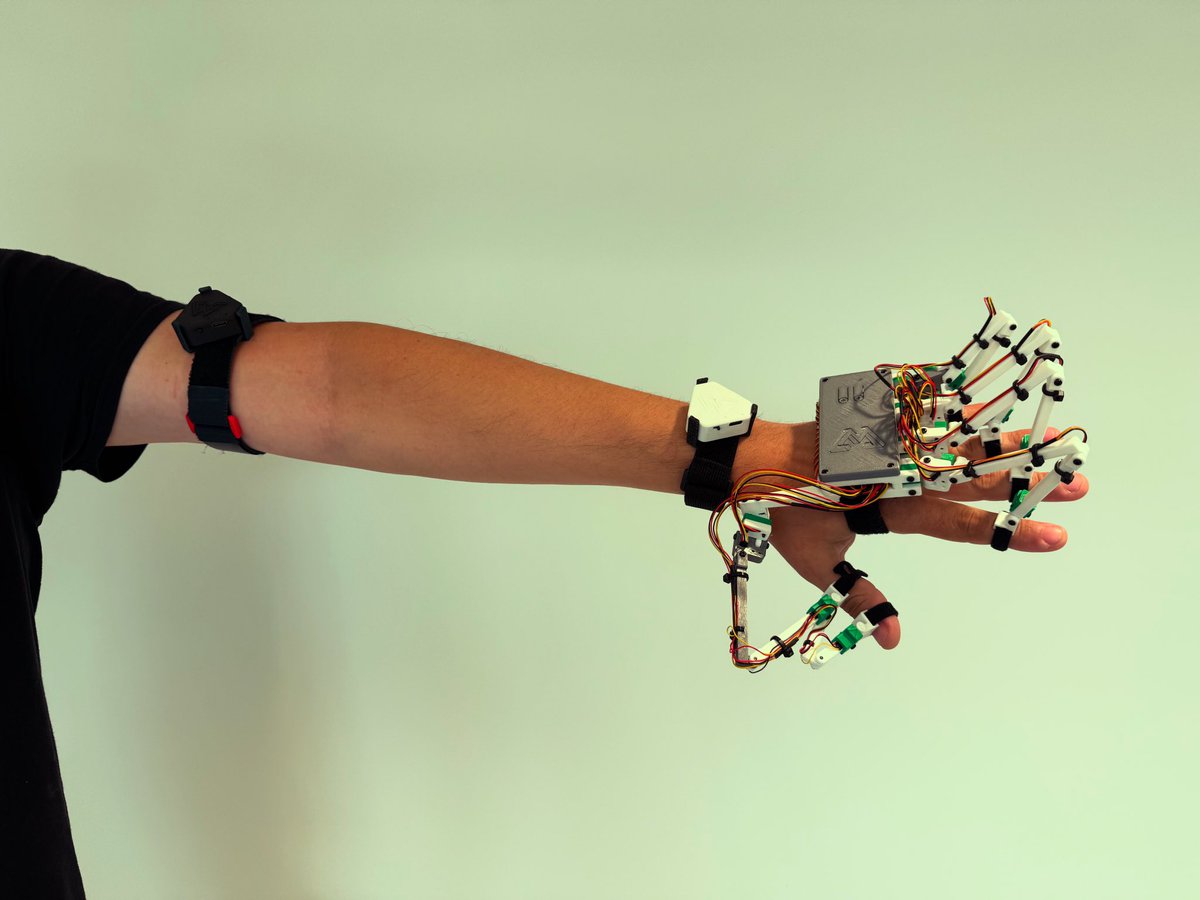
I/ Building datasets for embodied AI is tough—humanoid robots need real-world human motion task data, but collecting it at scale has been limited to research lab projects or closed source big labs. At Eidon, we started with our wearable IMU trackers. Here's what we've built and achieved so far.
🌅🤖 JUST PASSED 1000 HRS OF AI ROBOTICS DATA COLLECTION (synchronized arm tracking + egocentric video).
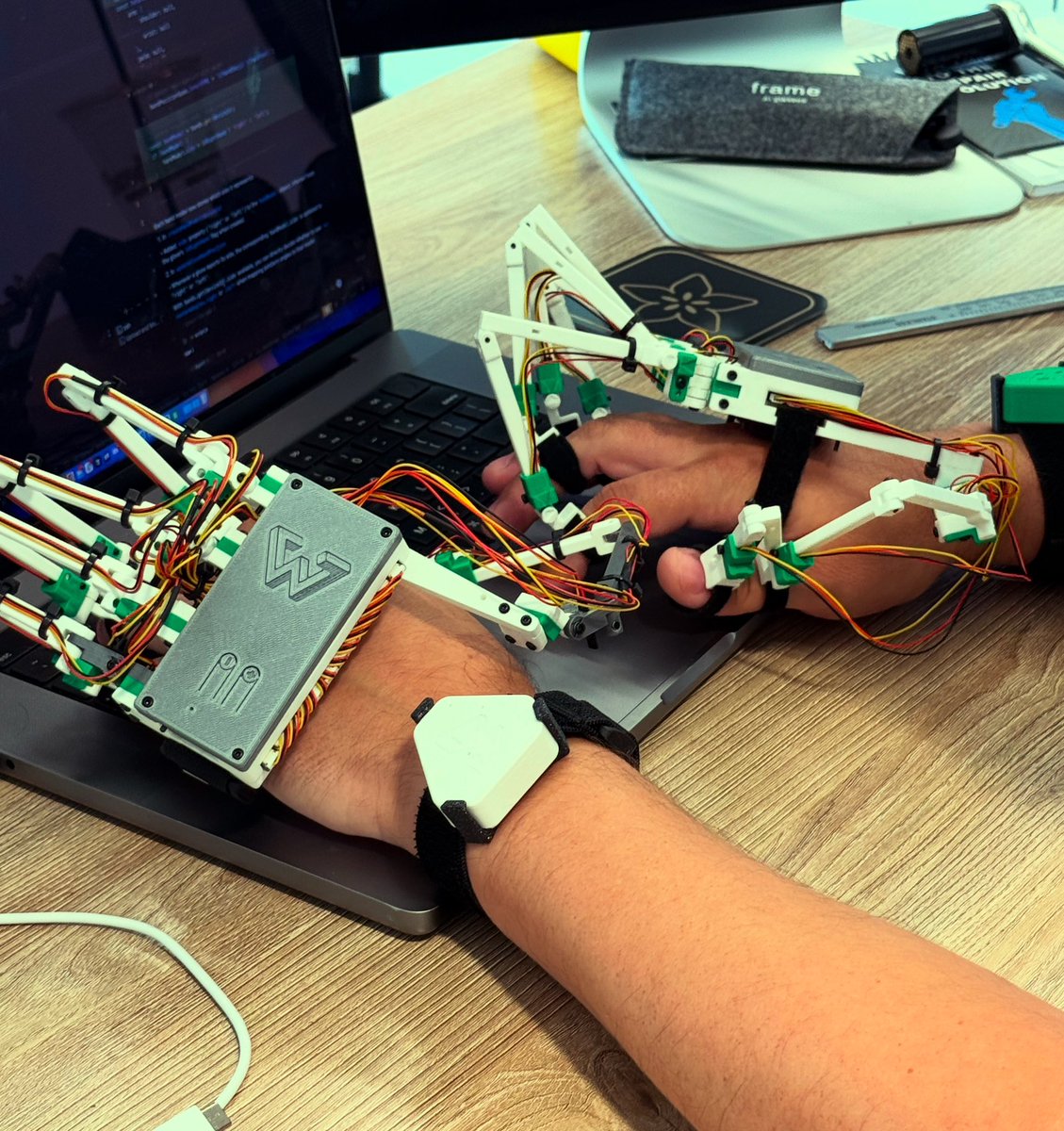
We continue to scale to 100k+hrs and include our GLOVE tech for dexterity.
The full sashimi SET: glove + arm trackers + egocentric video + Sym (simulation env). 🍣
2026 is peak of the AI Robotics data collection race.
DM for sample data and godspeed to 1M hrs
Decentralised Robotics 🧵
I/ Building datasets for embodied AI is tough—humanoid robots need real-world human motion task data, but collecting it at scale has been limited to research lab projects or closed source big labs. At Eidon, we started with our wearable IMU trackers. Here's what we've built and achieved so far.
Decentralised Robotics 🧵
I/ Building datasets for embodied AI is tough—humanoid robots need real-world human motion task data, but collecting it at scale has been limited to research lab projects or closed source big labs. At Eidon, we started with our wearable IMU trackers. Here's what we've built and achieved so far.
Decentralised Robotics 🧵
I/ Building datasets for embodied AI is tough—humanoid robots need real-world human motion task data, but collecting it at scale has been limited to research lab projects or closed source big labs. At Eidon, we started with our wearable IMU trackers. Here's what we've built and achieved so far.
Decentralised Robotics 🧵
I/ Building datasets for embodied AI is tough—humanoid robots need real-world human motion task data, but collecting it at scale has been limited to research lab projects or closed source big labs. At Eidon, we started with our wearable IMU trackers. Here's what we've built and achieved so far.
Decentralised Robotics 🧵
I/ Building datasets for embodied AI is tough—humanoid robots need real-world human motion task data, but collecting it at scale has been limited to research lab projects or closed source big labs. At Eidon, we started with our wearable IMU trackers. Here's what we've built and achieved so far.
today, we’re open sourcing the largest egocentric dataset in history.
- 10,000 hours
- 2,153 factory workers
- 1,080,000,000 frames
the era of data scaling in robotics is here. (thread)
IX/ If robotics is AI's endgame, a decentralized version is essential — thousands of hours of synchronized data from diverse contributors will power it. We've started with our wearable IMU trackers, capturing upper-body kinematics in real environments.
There is so much more to do.
Decentralised Robotics 🧵
I/ Building datasets for embodied AI is tough—humanoid robots need real-world human motion task data, but collecting it at scale has been limited to research lab projects or closed source big labs. At Eidon, we started with our wearable IMU trackers. Here's what we've built and achieved so far.
VIII/ Next: extending our data collection with Eidon Gloves and Glasses to capture fingers and dexterity data too. There is a long road of solving practical problems tho.