You think you've learned enough by now.
But crypto always has one more lesson waiting.
After a pretty successful launch, @plumenetwork rolled out Season 2 and kept it running for ~9 months
Points, badges, partner quests, ecosystem interactions, liquidity campaigns, even a spin wheel for the inner degen.
Result:
Token down 10x situation (a $7M exploit in January 2026 that drained yUSD positions on SagaEVM and triggered a full redemption pause
Reward for top 400: ~$28
But the real plot twist was the liquidity.
The funds I provided through the ecosystem route are still locked because of the @GetYieldFi / @Saga situation (a $7M exploit in January 2026 that drained yUSD positions on SagaEVM and triggered a full redemption pause)
Months have passed, and there have been almost no meaningful updates or clear recovery timeline.
Another lesson learned. Waiting for the next one.
A startup is offering free apartment cleaning in NYC.
The catch?
Cleaners wear cameras while doing normal home tasks:
• washing dishes
• mopping floors
• folding laundry
• organizing rooms
• cleaning messy spaces
That footage becomes training data for AI and robotics companies
The startup is called Shift, and the idea is simple:
“You get a clean apartment.
AI gets real-world training data.”
And this says a lot about where physical AI is going.
Robots don’t just need better models. They need:
• real human actions
• real environments
• real mistakes
• real edge cases
• messy physical tasks
• high-quality interaction data
@PrismaXai is not about cleaning apartments, of course.
But the bigger idea is similar. Humans interact with robotic systems. Robots generate real-world signals. And those interactions can become part of a better physical AI data loop.
That is the part people often miss.
The next robotics race may not only be about who builds the best robot.
It may be about who collects the best real-world data.
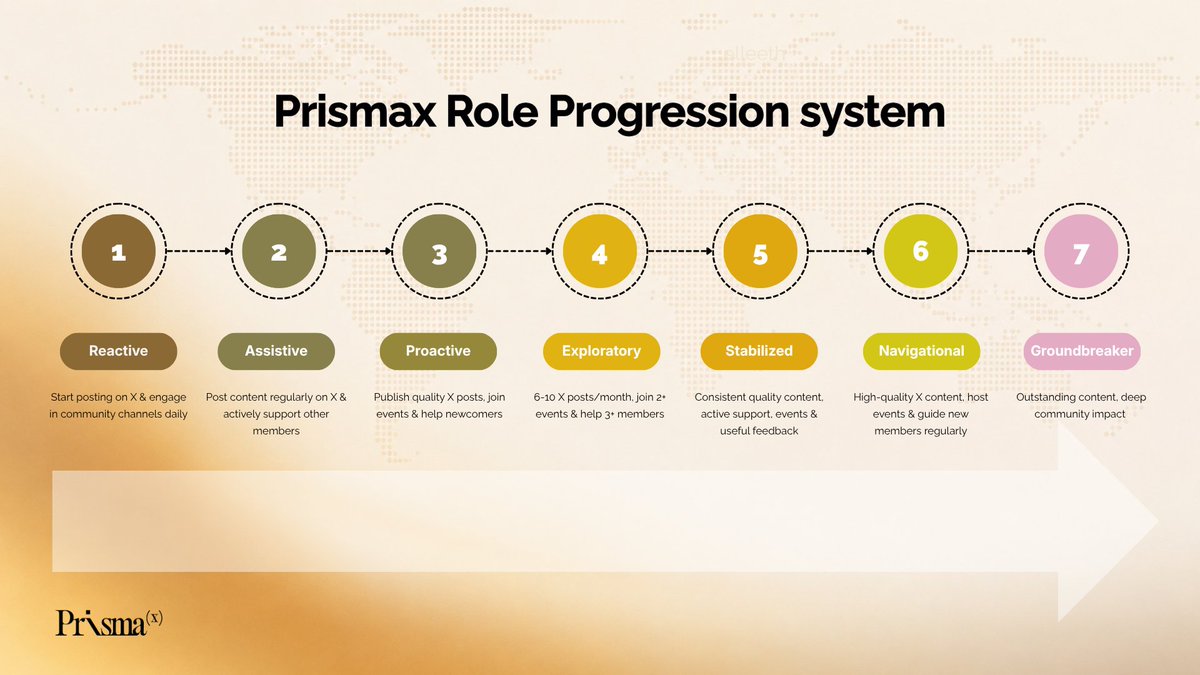
The role progression @PrismaXai just got an update and here's a quick breakdown 👇
The path is clear: No Role → Reactive → Assistive → Proactive → Exploratory → Stabilized → Navigational → Groundbreaker
But here's the key thing: numbers alone won't get you promoted.
The full picture matters:
- content quality
- user support
- event participation
- regional community growth
- useful feedback & bug reports
- community safety
- consistency over time
Do any of these well - and it counts.
Reviews happen monthly, 10th–20th of each month.
Groundbreaker is the top role.
And it comes with real perks:
- 60 min/week exclusive teleoperation
- priority Ambassador consideration
- early access to events
- tests & private activities
But it's not a permanent badge. Stay active or keep contributing - 180 min/month teleop minimum to keep it.
Less role farming. More real impact.
5 days until Robots & Rollups at #NYTechWeek
Live teleop. Robot dogs. AI-mixed cocktails.
The only event this week where physical AI meets onchain for real. NYC, June 3 👇
@a16z@PrismaXai
Quick reminder: Robots & Rollups during @a16z#NYTechWeek is 9 days away 🍸🤖
Live teleop. Robot dogs. AI-mixed cocktails. The only #NYTechWeek event bringing physical AI and crypto under one roof.
Tuesday, June 3 in NYC.
RSVP ⤵️
https://t.co/SGuIgma07X
Most robots don't grasp well. And it's not the models.
Doesn't Grasp is a new monthly podcast by @castorhat (@PrismaXai) about what's actually going on in robotics. No hype, just real conversations with people building this stuff.
Ep. 1 Recap with Dane Kouttron 👇
❓ What's actually holding robotics back?
→ Force control. Everyone knows it matters, but collecting force data for training is still not really sorted. Most teams just skip it because small robots don't hurt anyone when they fail — so failures get ignored.
❓ Why teach robots to paint?
→ Painting is a surprisingly good test — you need precise pressure, you need to react to a changing canvas, manage how much paint is on the brush. If you get that working, a lot of other things follow.
❓ Why is vision not enough for robots?
→ Using camera images as a substitute for force sensors is a bad trade. You're burning pixels to guess something a cheap sensor would just tell you. And on top of that, models often run on badly cropped, squashed video - aspect ratios ignored, resolution tanked.
❓ Where do you get cheap robots to experiment with?
→ Old industrial arms nobody wants anymore. A large Kuka can be basically free — sometimes factories will pay you to take it away. Pair it with modern controllers and you have a real research setup.
❓ Robot eldercare - is it actually happening?
→ State of the art still misses a cup 1 in 15 tries. The pitch goes: lots of old people → hard to find caregivers → clearly the answer is robots. The steps in between get skipped. And a robot that throws around trash cans will throw grandpa around the same way.
🎧 Listen:
YouTube: https://t.co/PEvGkrq9qL
Spotify: https://t.co/1rb84F0Vxj
Apple Podcasts: https://t.co/ygjKIWT6fU
Doesn't Grasp is live 🎙️
A new monthly podcast on what's actually happening in robotics and physical AI. Hosted by @castorhat, sponsored by PrismaX.
Technical, unscripted. The conversations you can't get from viral tweets.
I joined @PrismaX because controlling a real robot through a browser sounded too interesting to ignore.
And somehow I ended up upgrading to Innovator, reporting robot arm bugs, making content, grinding the leaderboard - and discovering that UA has elite Smash Karts players 😄
It's already been 7 months since I first joined the project.
At first, I was just curious about how robotics and physical AI actually work in practice. I started with Amplifier - and about two months later upgraded to Innovator, because I saw real potential in what PrismaX is building.
Since then, I've stayed active through Tele-Ops, bug reports, content, guides, and community work. Not because I had to - because it genuinely kept me interested.
The community is a big reason I stayed. Especially the Ukrainian side - friendly people, real support, jokes, games, and actual help when someone's trying to understand the product.
Even during quiet market periods, PrismaX is still one of the projects I keep coming back to.
Introducing the PrismaX Regional Ambassador Program.
A select cohort of regional leaders building local PrismaX communities in their language, region, and time zone.
Applications open today 👉 https://t.co/CMQMvR9nW9
Robotics is scaling fast.
542,000 industrial robots were installed globally in 2024, and humanoid robotics is projected by Goldman Sachs to reach $38B by 2035.
But more robots also means a bigger need for real-world data.
That is the @PrismaXai angle I keep coming back to.
Tele-Ops is the entry point.
The bigger layer is human input, robot interaction, data quality, validation, and learning over time.
More robots are coming.
They still need to learn from the real world.
I think this is an important distinction.
Industrial automation and physical AI are related, but they are not the same thing.
A lot of old automation was built for big, repeatable systems.
Physical AI feels more useful in places that are less clean and less predictable -- smaller businesses, lower-volume work, and real-world environments where old automation never worked that well.
That is also why @PrismaXai interesting to think about here.
Because in those cases, the challenge is not just building the machine.
It is also operating it, collecting useful data, improving performance, and handling messy real conditions.
That is where the bigger opportunity may be.