Assistant Prof. @GMUCompSci. Research at the intersection of Robotics, Planning, and Machine Learning to make robot planning more comfortable with uncertainty.
Our new paper develops robots that don’t just complete tasks: they anticipate how their actions impact what comes next.
Example: when putting objects away, organizing them neatly isn’t just aesthetic—it makes future retrieval faster and easier. 📝🧵👇
We demonstrate anticipatory TAMP on a real Fetch mobile manipulator.
Compared to myopic planning, anticipation reduces the number of actions and total execution time over task sequences.
We're excited to announce the third workshop on LEAP: Learning Effective Abstractions for Planning, to be held at #CoRL2025@corl_conf!
Early submission deadline: Aug 12
Late submission deadline: Sep 5
Website link below 👇
Most student authors (or other first time BibTeX users) don't realize that extra curly brackets around an {ACRONYM} are needed to preserve capitalization. It's *such* a small thing, but it makes clear the bibliography hasn't been proofread (and doesn't look good in a thesis 👨🎓)
On my way to Baltimore to attend the NSF FRR/NRI PI meeting and excited to share some recent work and talk robotics for the next couple days 🤖. Be sure to say hello if you see me!
Amazing how quickly a huge project can go from high-effort-not-nearly-done to *done*. Been working on a grant for weeks and putting time towards it nearly every day and then suddenly 🎉 every section is drafted, every figure made, no more todo items... 🫠
With all the acceptance news RE @ieee_ras_icra, my lab got... 0 papers accepted!🙃 A reminder that not all good papers get accepted & rejection can be an opportunity for further improvement. Still proud of my lab's work and excited to share (just a bit later than expected)!
Just got back from a great visit to @ASU (thanks to @nakulgopalan for hosting me!) where I talked about some of my lab's ongoing work in making long-horizon planning in partially revealed environments more performant and reliable.
Credit goes to my student and first author @abpaudel. Stop by his talk or poster at #IROS2023 [WeBT17] or, if you're not in Detroit, read our blog post: https://t.co/8p615IpO2b See our paper ( https://t.co/Qqfuce0Qtu ) for more experiments and details.
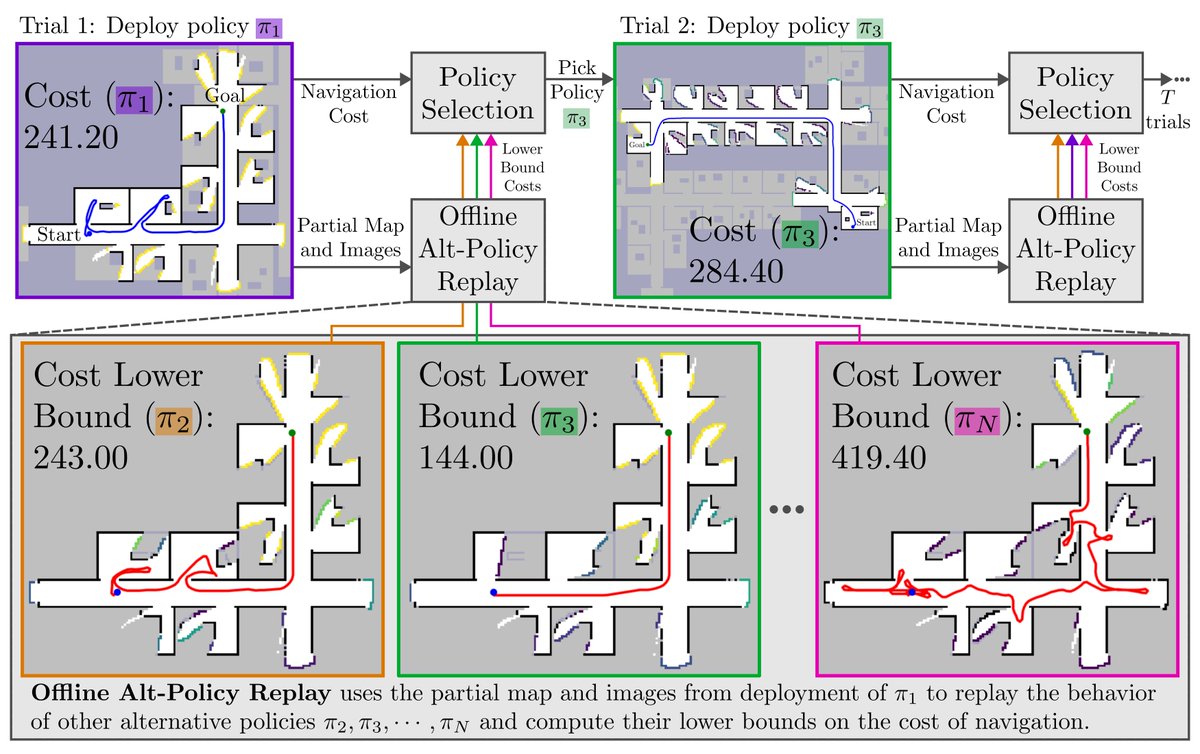
Very excited to present our work: Data-Efficient Policy Selection for Navigation in Partial Maps via Subgoal-Based Abstraction! We enable a learning-guided robot deployed in partially-mapped environments to quickly/reliably select the best of a set of nav policies #IROS2023 🤖🧵
Our approach converges *much* more quickly resulting in lower average navigation cost and cumulative regret in simulated maze and office-like environments.