Fifteen years ago, I had the privilege of working with Rosen Diankov at CMU on his PhD thesis. The capstone was IKFast — for a generation of roboticists, the definition of what analytical inverse kinematics could be.
Today, I'm excited to release the next chapter: ssik.
1/
Fifteen years ago, I had the privilege of working with Rosen Diankov at CMU on his PhD thesis. The capstone was IKFast — for a generation of roboticists, the definition of what analytical inverse kinematics could be.
Today, I'm excited to release the next chapter: ssik.
1/
This week's #PaperILike is "Plan-based Reward Shaping for Reinforcement Learning" (Grzes & Kudenko, 2008).
A nice combo of planning and RL that takes seriously the policy invariance ideas from Ng, Harada, & Russell (1999) [another paper I like!].
PDF: https://t.co/1YZmk3GgfQ
This week's #PaperILike is "QuestBench: Can LLMs ask the right question to acquire information in reasoning tasks?" (Li, Kim, & Wang, NeurIPS 2025).
Beautiful paper & increasingly important as agents start to ask more Qs. Curious how SOTA models do.
PDF: https://t.co/6RknU1nPgD
This week's #PaperILike is "Classical Planning in Deep Latent Space: Bridging the Subsymbolic-Symbolic Boundary" (Asai & Fukunaga, AAAI 2018).
One of the key papers that got me hooked on learning + planning before I started grad school.
PDF: https://t.co/FDsn70C8Fz
I've noticed a feature of LLM writing; curious if it has a name. On advanced topics, LLMs connect two true statements with a "because" / "but" / "therefore" etc. -- but the two statements are not actually related. Hallucinonsequiturs?
This week's #PaperILike is "Human-Guided Complexity-Controlled Abstractions" (Peng et al., NeurIPS 2023).
Selecting the right levels and kinds of abstractions remains important and open for many forms of human-AI / human-robot interaction.
PDF: https://t.co/17YyGMapW8
Last July, I started my role as founding co-director of the Princeton Robotics Initiative (w/ Aimy Wissa)!
We kicked things off with an inaugural symposium on our vision of humanity-driven robotics. Amazing to see the excitement, with 300+ attendees and 80+ posters! 🐯🤖
This week's #PaperILike is "HG-DAgger: Interactive Imitation Learning with Human Experts" (Kelly et al., 2019).
This would definitely be high on my list of "papers to read if you want to understand what robot foundation model startups are doing."
PDF: https://t.co/GsCEQ2axwi
@vnhartmann@saxenavaibhav11 Ah, multiple robots in the same environment, understood. That also is something we have discussed. I can't promise we'll have it soon, but it is on the roadmap :)
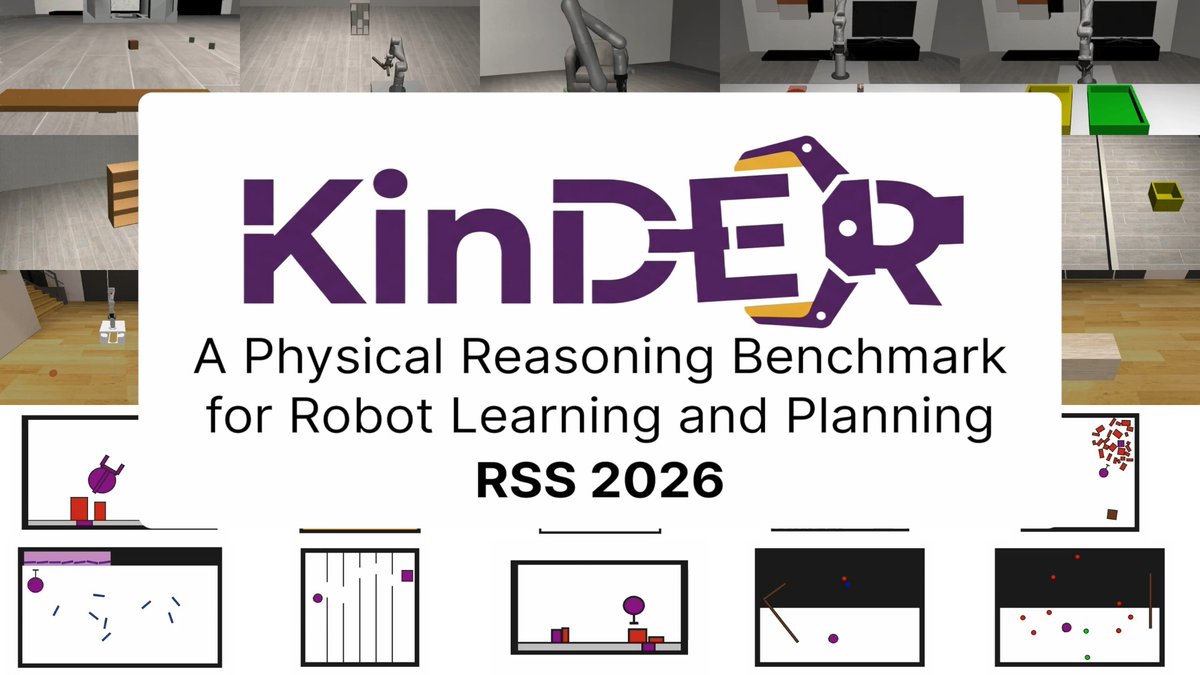
As a planning+learning researcher, I’m really excited about KinDER. It clarifies planning (especially TAMP) for outsiders, defines key open challenges for the field, and creates a common ground to compare & combined planning+learning approaches. (1/n)
Meet KinDER — a stress test for robot physical reasoning. All 13 methods failed 😈
🌎 25 environments
♾️ Infinite tasks
🏋️ Gymnasium API
⚒️ Over 20 parameterized skills
🪧 Human demonstrations
📊 13 baselines (planning and learning)
From @Princeton@CMU_Robotics@ICatGT@CambridgeMLG@nvidia@MIT_CSAIL
🧵 1/n
Building autonomous robots that learn to reason and plan in the physical world is a long-standing problem.
We are excited to release KinDER, a large task suite and benchmark to bring different communities (TAMP, VLA, RL, etc.) together for this challenge!
Welcome to try it out!
KinDER is finally released 🎉
A step forward in defining what physical reasoning is and how to evaluate it, through many kinematic and dynamic manipulation challenges.
See @YixuanHuang13 post to learn more! See you at RSS!
There's so much infra that went into this project - tasks in MuJoCo/PyBullet/Pymunk, Parameterized Skills, LLM/VLM Planners, MPC, PPO, SAC, DP, VLAs, and more.
Kudos to the entire team for bringing this together! See you all at RSS :)
Long-horizon physical reasoning used to be the specialty of TAMP.
KinDER is a new sim benchmark that horizontally compares across paradigms, from VLA to PDDL bilevel planning to RL.
If you care about hard physical reasoning tasks, give KinDER a try!
To appear at RSS 2026.
@vnhartmann Thanks very much! Yes, in fact @saxenavaibhav11 has already added a Rainbow RB-Y1 behind the scenes :) Good to know that this is of interest.
As robot learning starts to mature, it’s important that we develop rigorous benchmarks to provide a North Star for progress and also compare a very wide variety of approaches. I think KinDER accomplishes both of these aims and more, and I’m excited to hopefully see fast progress on these tasks! 🤖
I also want to give a massive shout out to all the authors who put in an extraordinary engineering effort, especially the leaders @YixuanHuang13, @Bw_Li1024 , and @saxenavaibhav11 👏 (n/n)
Check out these environments and others (25 total) in the “KinDERGarden”: https://t.co/PSMyMMhTPw
And look out for KinDER at RSS 2026! https://t.co/ueT5M2x95S