Having fun rendering @AutodeskRevit models with @EvolveLABio#Veras using #AI! This model is the rac_basic_sample model that comes with the #Revit installation.
https://t.co/eVWYG3GuMH
I took delivery of a beautiful new shiny HW4 Tesla Model X today, so I immediately took it out for an FSD test drive, a bit like I used to do almost daily for 5 years. Basically... I'm amazed - it drives really, really well, smooth, confident, noticeably better than what I'm used to on HW3 (my previous car) and eons ahead of the version I remember driving up highway 280 on my first day at Tesla ~9 years ago, where I had to intervene every time the road mildly curved or sloped. (note this is v13, my car hasn't been offered the latest v14 yet)
On the highway, I felt like a passenger in some super high tech Maglev train pod - the car is locked in the center of the lane while I'm looking out from Model X's higher vantage point and its panoramic front window, listening to the (incredible) sound system, or chatting with Grok. On city streets, the car casually handled a number of tricky scenarios that I remember losing sleep over just a few years ago. It negotiated incoming cars in tight lanes, it gracefully went around construction and temporarily in-lane stationary cars, it correctly timed tricky left turns with incoming traffic from both sides, it gracefully gave way to the car that went out of order in the 4-way stop sign, it found a way to squeeze into a bumper to bumper traffic to make its turn, it overtook the bus that was loading passengers but still stopped for the stop sign that was blocked by the bus, and at the end of the route it circled around a parking lot, found a spot and... parked. Basically a flawless drive.
For context, I'm used to going out for a brief test drive around the neighborhood to return with 20 clips of things that could be improved. It's new for me to do just that and exactly like I used to, but come back with nothing. Perfect drive, no notes. I expect there's still more work for the team in the long march of 9s, but it's just so cool to see that we're beyond finding issues on any individual ~1 hour drive around the neighborhood, you actually have to go to the fleet and mine them. Back then, I processed the incredible promise of vehicle autonomy at scale (in the fully scaleable, vision only, end-to-end Tesla way) only intellectually, but now it is possible to feel it intuitively too if you just go out for a drive. Wait, of course surround video stream at 60Hz processed by a fully dedicated "driving brain" neural net will work, and it will be so much better and safer than a human driver. Did anyone else think otherwise?
I also watched @aelluswamy 's new ICCV25 talk last week (https://t.co/RdaM23kvez) that hints at some of the recent under the hood technical components driving this progress. Sensor streams (videos, maps, kinematics, audio, ...) over long contexts (e.g. ~30 seconds) go into a big neural net, steering/acceleration comes out, optionally with visualization auxiliary data. This is the dream of the complete Software 1.0 -> Software 2.0 re-write that scales fully with data streaming from millions of cars in the fleet and the compute capacity of your chip, not some engineer's clever new DoubleParkedCarHandler C++ abstraction with undefined test-time characteristics of memory and runtime. There's a lot more hints in the video on where things are going with the emerging "robotics+AI at scale stack". World reconstructors, world simulators "dreaming" dynamics, RL, all of these components general, foundational, neural net based, how the car is really just one kind of robot... are people getting this yet?
Huge congrats to the team - you're building magic objects of the future, you rock! And I love my car <3.
Rendering ideas (SketchUp + Veras AI) for 2 units (phase 2) of a 6 unit SB-684 subdivision with Dogtown Development.
Dogtown was one of the first developers I worked with when I started Baran Studio. We also partnered on my first development deal.
Relationship building is one of those things they don’t teach you in (architecture) school. But it is so essential.
Maintaining mutual respect and trust is key.
I’m happy to say we’re still working with Dogtown 15 years later.
Naval Ravikant: “Inspiration is perishable”
Naval argues that inspiration is perishable — so when you’re inspired, act on it immediately. This is as true for solving a problem for your company as it is for learning something new:
“If I want to learn something, I do it at the moment of curiosity. The moment the curiosity arrives, I go learn that thing immediately. I download the book or get on Google, ChatGPT, whatever, and I will figure that thing out on the spot. That’s when the learning happens. It doesn’t happen when I’ve scheduled time or set an hour aside. Because when that time arrives, I might be in a different mood and want to do something different. I think that spontaneity is really important. You’re going to learn best when you’re having fun and when you genuinely are enjoying the process — not when you’re forced to sit there and do it.”
He believes that giving yourself the freedom to act on something the moment you want to is not only liberating and a recipe for happiness, but it’s also crucial to efficiency, productivity, and success.
“Procrastination is because you don’t want to do that thing right now. You want to do something else. Go do that something else. I reject this frame that efficiency, productivity, and success are counter to happiness and freedom. They actually go together.”
Naval continues:
“The happier you are, the more you can sustain doing something… and you will outwork everybody else. The more free you are, the better you can allocate your time and the less you’re caught up in a web of obligations and commitments, and the more you can focus on the task at hand.”
Video source: @ChrisWillx (2025)
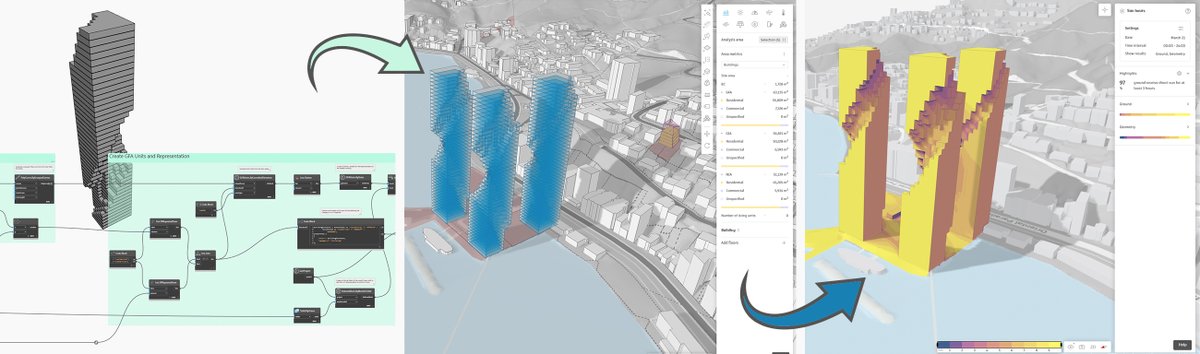
Hello world of dynamo 👋
We are incredibly excited to announce that the "Dynamo-Forma connection is now in Open Beta"!
Moving on from a Closed Beta for the Dynamo Service announced at AU2024 last year we have now shifted into full open-beta #Woohoo 🤓
Chaos acquires AI software firm EvolveLAB
Developer of V-Ray and Enscape will gain valuable AI visualisation technology and unlock new opportunities in AEC design software
https://t.co/1YEDcQarCH
#AIarchitecture#AI#archviz#enscape#vray@ChaosGroup@EvolveLABio
Chaos comprou a EvolveLab
A Chaos anunciou a compra da EvolveLab, desenvolvedora do Veras AI, Glyph, Morphis e Helix, portanto, finalmente perceberam que precisam investir em recursos de AI nos seus Renders, mas algumas Apps não encaixam na Chaos. https://t.co/KuuJafwMEE