Top Tweets for #pointprecise

Dose anyone know ?
3D scanning app Point Precise
Is ended?
My Scaning projects cannnot conect
#pointprecise #isitended


A #Military tank was scanned well via the #pointprecise app & resulting in amazing #3Dpointclouds.
App Store: https://t.co/jJEqntjVmu
Web: https://t.co/XL9hpTj5zJ
#3dscan #realitycapture #laserscanning #scantobim #lidar #heavyequipment #computervision #photogrammetry #innovation
A construction site pipeline area shot by a drone camera & upload into #pointprecise web & resulting in amazing 3D #pointclouds.
App Store: https://t.co/jJEqntjnwW
Web: https://t.co/XL9hpTixKb
#3dscanner #realitycapture #laserscanning #landsurveying #scantobim #lidar #pointcloud

Perhaps with practice I will be able to improve the scope up to the fourth level, which was left with a lot of noise and missing information, even so, the scope of @Pointprecise is still surprising as it is free.
#iPhone #lidar #scan #3d #pointprecise

#pointprecise だけど、30m × 10mくらいのオフィスでこれくらいなら全然いい。
試しに構造物のスキャンを #dot3d と合わせてみようかな。
断面の高さ変えてもそんなにズレは変わらなさそう。

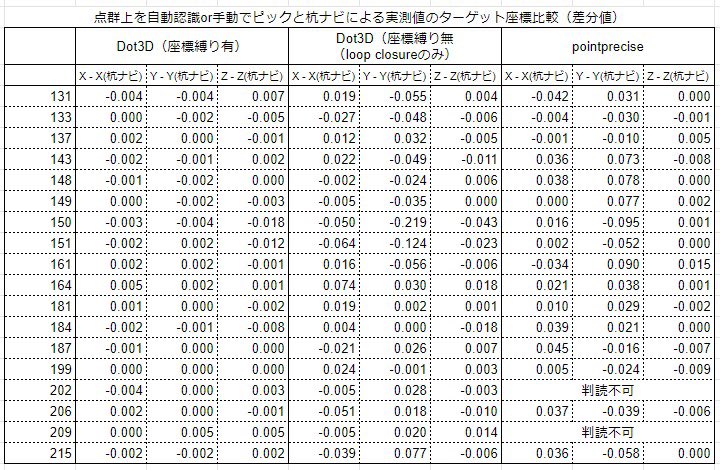

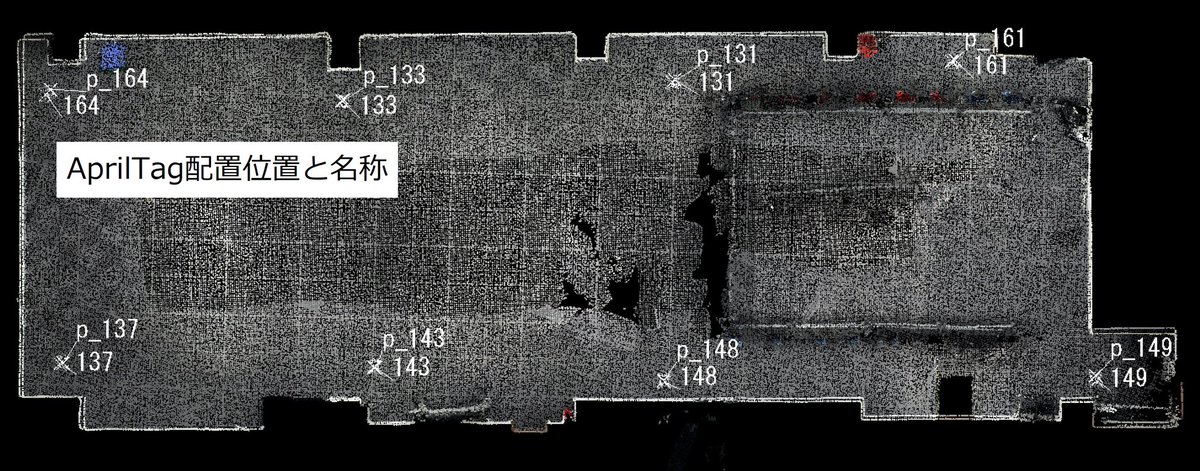
8. #Dot3d の点群のApriltag座標をエクスポート(杭ナビ座標縛りでoptimized)
9.1.と6.の差、1.と7.の差、1.と8.の差算出
10.9.の平均とRMSEを算出
青 #dot3d (loop closureのみ)
緑 #dot3d (杭ナビ座標縛り)
オレンジ #pointprecise


5.杭ナビの座標を基準に #pointprecise の点群を位置合わせ
6. #pointprecise の点群のApriltag座標を手動でピックしエクスポート
7. #Dot3d の点群のApriltag座標をエクスポート(loop closureのみでoptimize)
(続く)
以下、比較方法等の細かいところをつらつらと。
『作業手順』
1. Apriltagを設置して杭ナビで実測
2. Apriltagが写るよう #Dot3d でスキャン(loop closureのみでoptimize)
3.2.を杭ナビ座標縛りでoptimized)
4.Apriltagが写るように #pointprecise でスキャン
(続く)
#pointprecise の検証作業。
1. #dot3d (杭ナビ座標縛り)
2. #dot3d (loop closureのみ)
3. #pointprecise
の3種類のスキャンと、杭ナビの実測値を比較した結果、1.→3.→2.の順に精度が高かった。
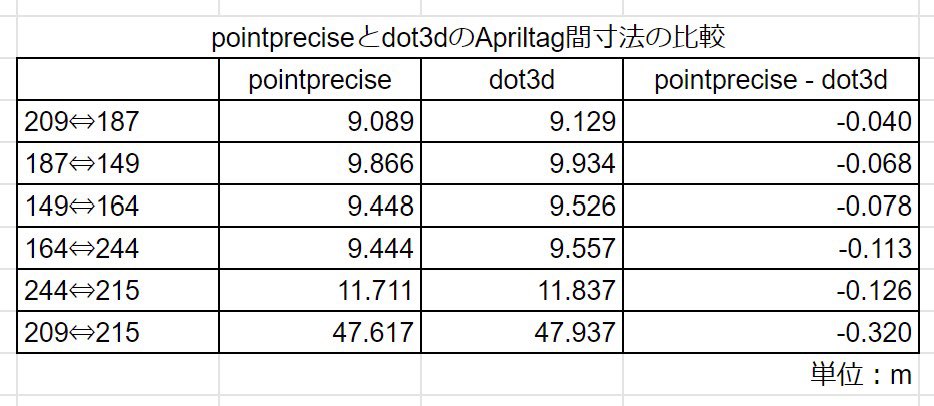
#pointprecise は他のスキャンに比べて全体的に小さく(距離が短くなる)ようです。なぜ?

4.#Dot3d の点群のApriltag座標をエクスポート(Apriltag名:164 等)
5.#pointprecise の点群のApriltag座標をエクスポート(Apriltag名:p_164 等)
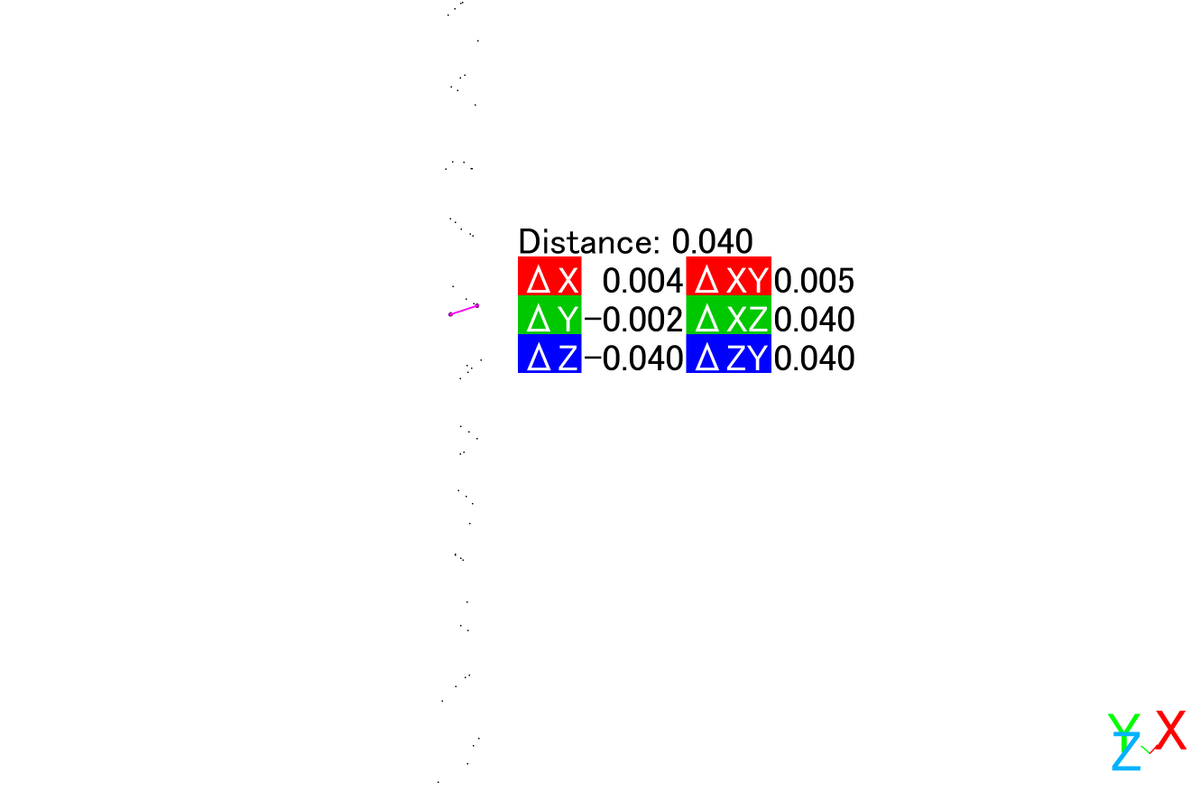
6.4.と5.の差を算出
時間なくてApriltag間距離測れなかったから、あくまで比較だけ。。。
『作業手順』
1.Apriltag貼って #Dot3d でスキャン(loop closureでoptimize)
2.Apriltagが写るように #pointprecise でスキャン
3.#Dot3d の点群を基準に #pointprecise の点群を位置合わせ
(続く)



#pointprecise で5分スキャンで140m。
点群のみだから少し荒くて好み分かれるけど。
メッシュもいいけど点群のなんとも言えない粒感が好きなんだよな。

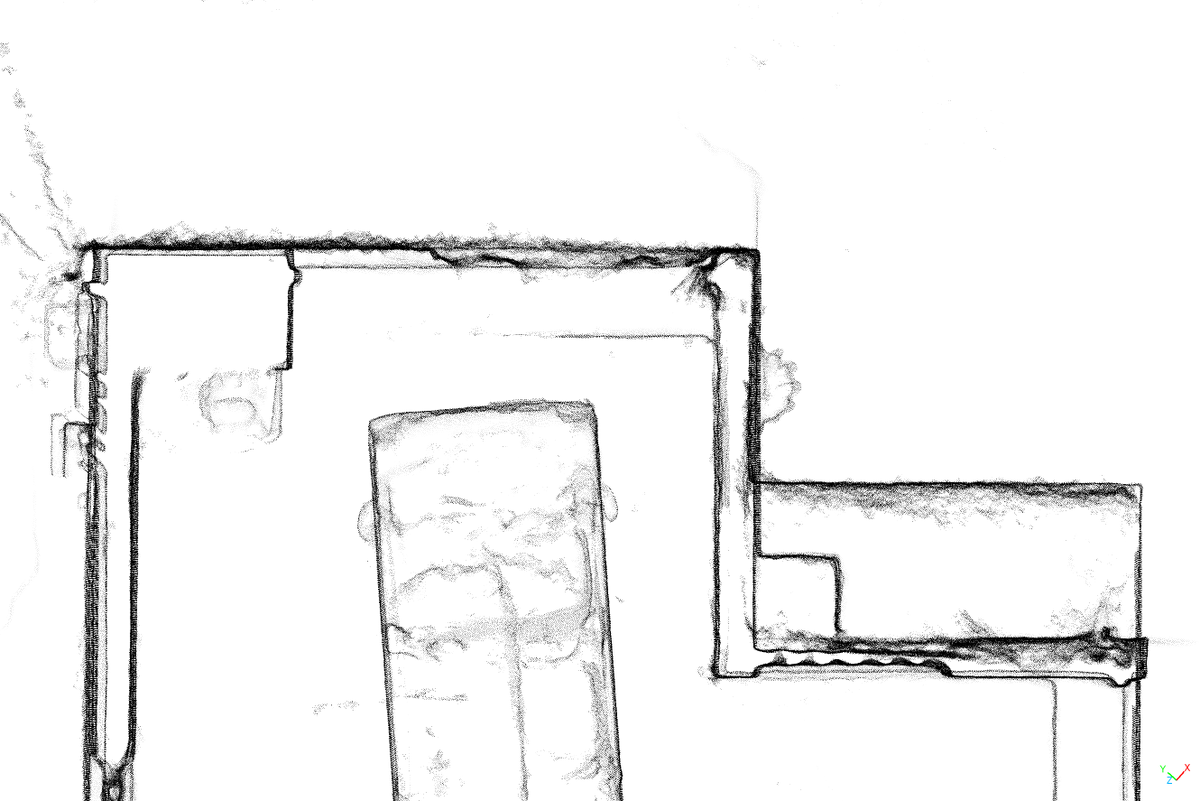
#pointprecise 点群の水平方向のバラツキは50mmのスライスで約30~50mm程度。
iOS LiDAR端末であればスケーリングできる。他の端末でキャプチャした動画でも、ブラウザ経由でアップロードすれば処理は可能とのこと。
また、ブラウザからUAV画像を流せば、オルソ画像を作成することもできる(tiff,kml)
点群の見た目は、遠目ではほぼ違いはないと思う。
大きな違いとして、#pointprecise はLargeAreaとかLargeObjectの設定でスキャンすると10mm等粗い点群しか出力出来ない。
#dot3d は濃くスキャンすればするだけ細かく出力出来る。
いや、使いようによっては、#pointprecise も同じくらい、もしかしたらそれ以上に広いエリアをスキャン出来るかも。。。
きちんと閉合出来るなら、ヘルマート変換だけで精度良く位置合わせできるのかな?
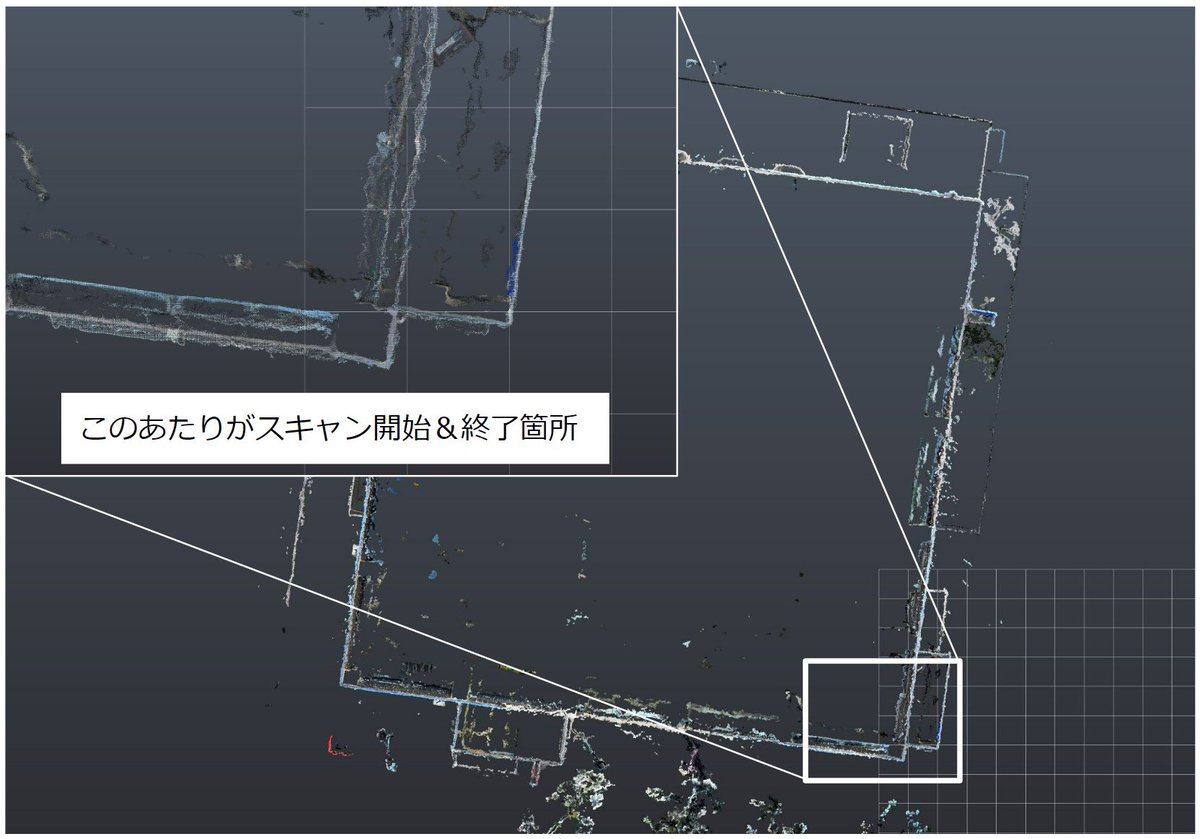
#pointprecise で別の箇所のスキャン。
これは一周回って閉合するようにスキャンしてます。
予想通り、スキャン開始&終了地点でのギャップがほぼない。
壁の点群が抜けてる以外は、結構使い道あるんじゃないか?
scaniverse や3d scanner appなどの座標縛りをしないスキャンアプリは共通して歩行距離に対して+1%程度の誤差が生まれるけど、#pointprecise はなぜかマイナス方向に誤差が生まれた。
スキャン方向は右から左に統一したし。なにか計算間違ってるのかな?
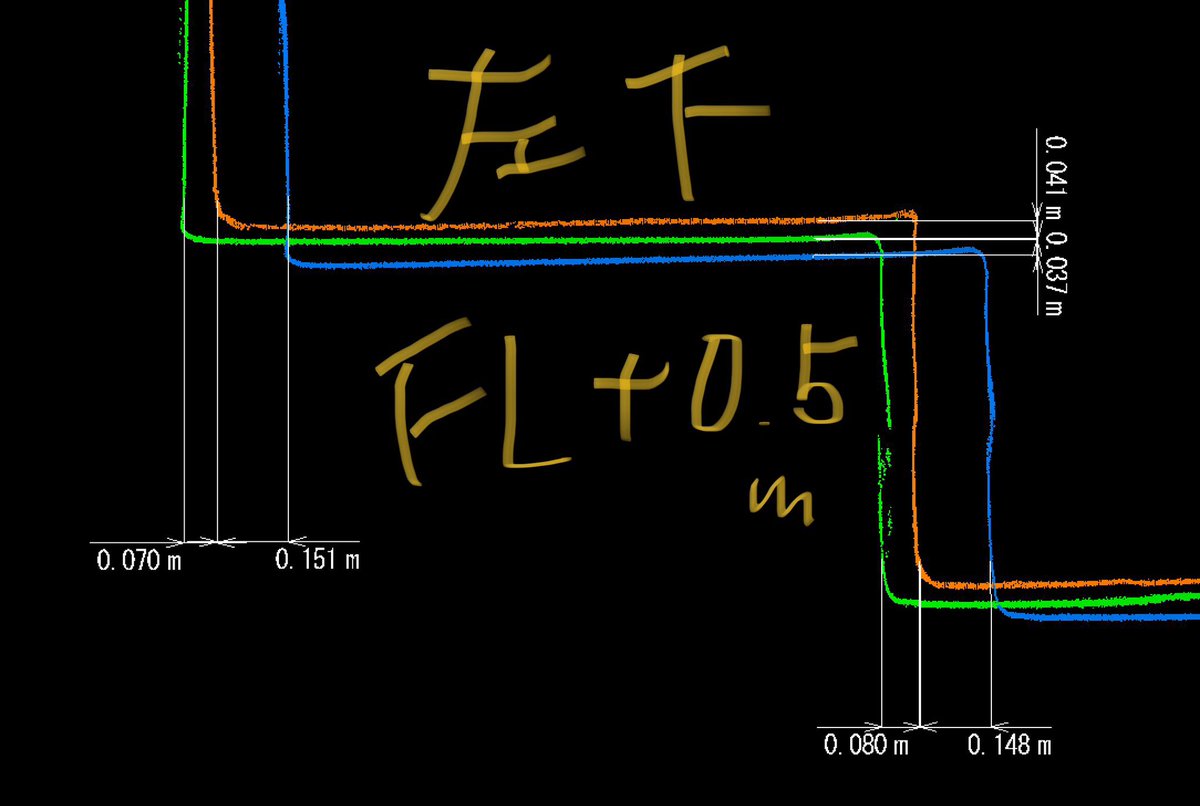
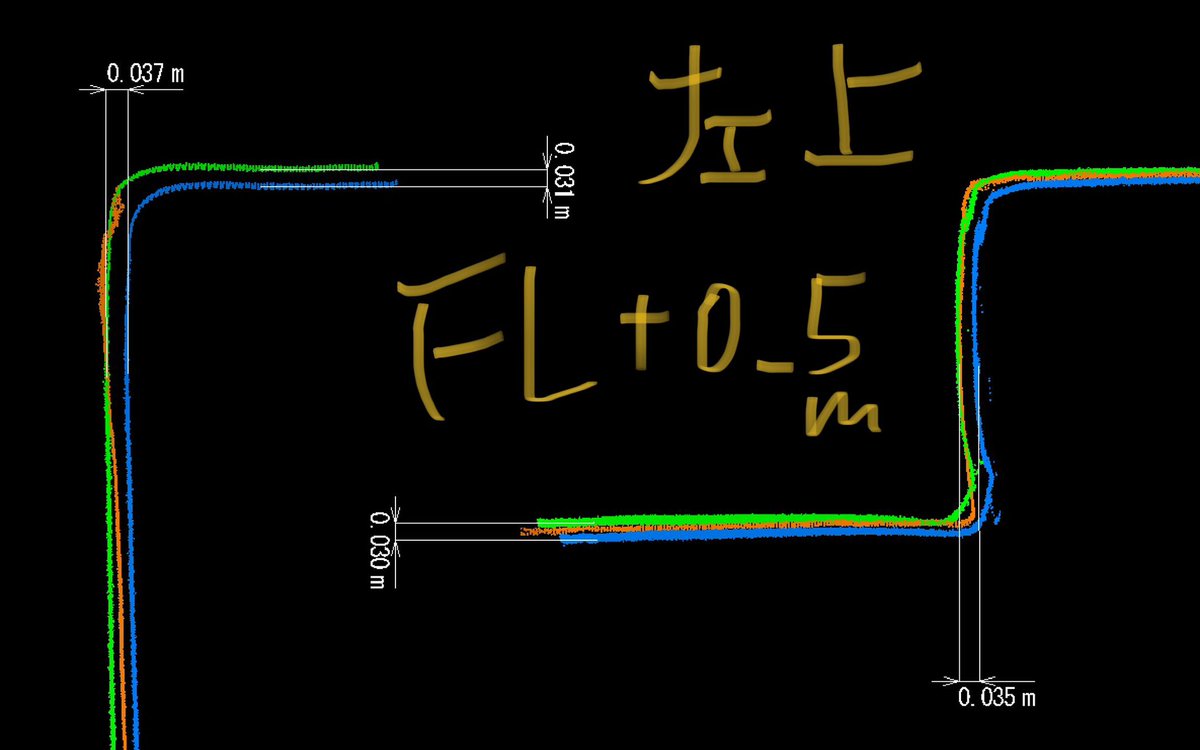
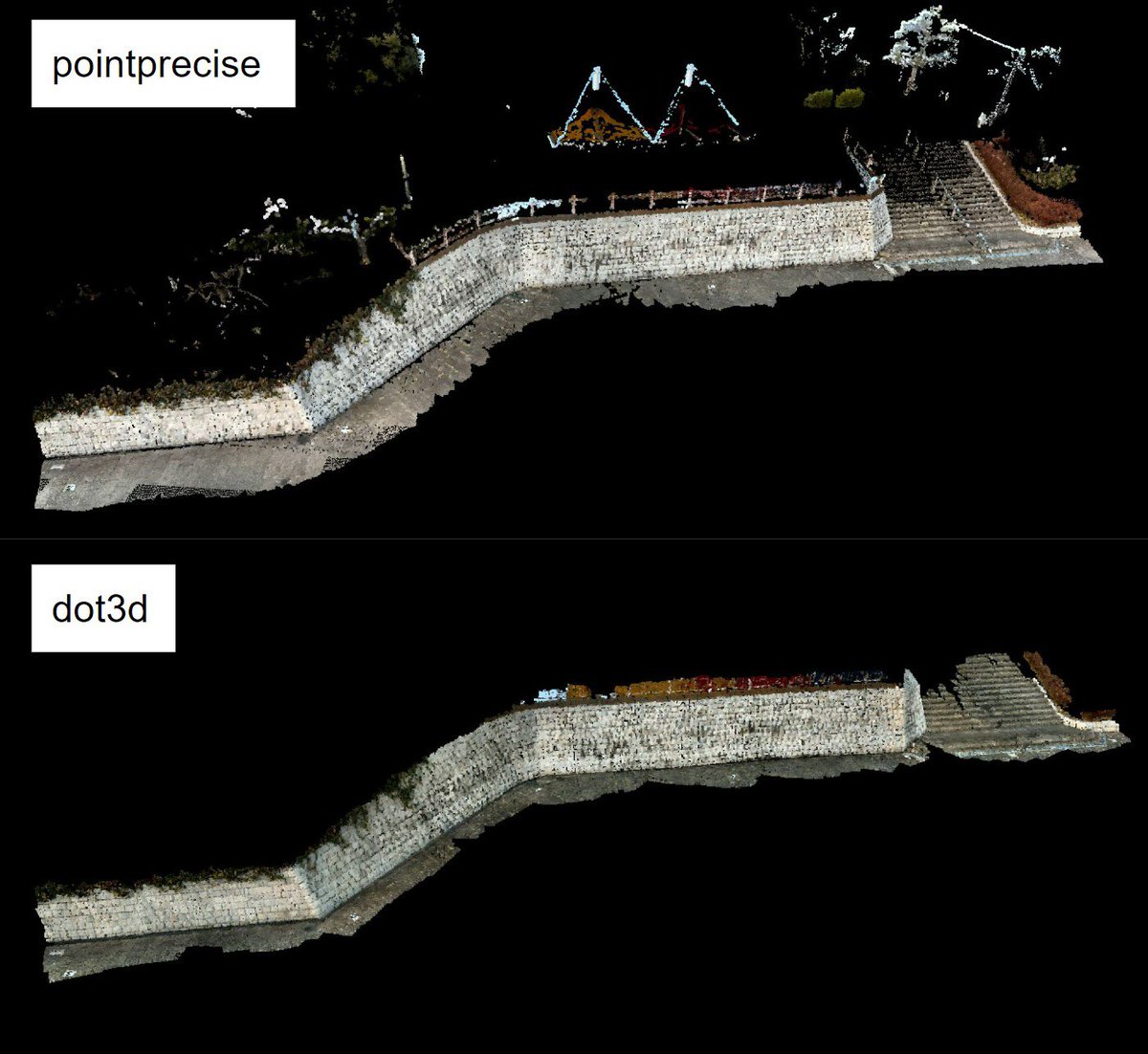
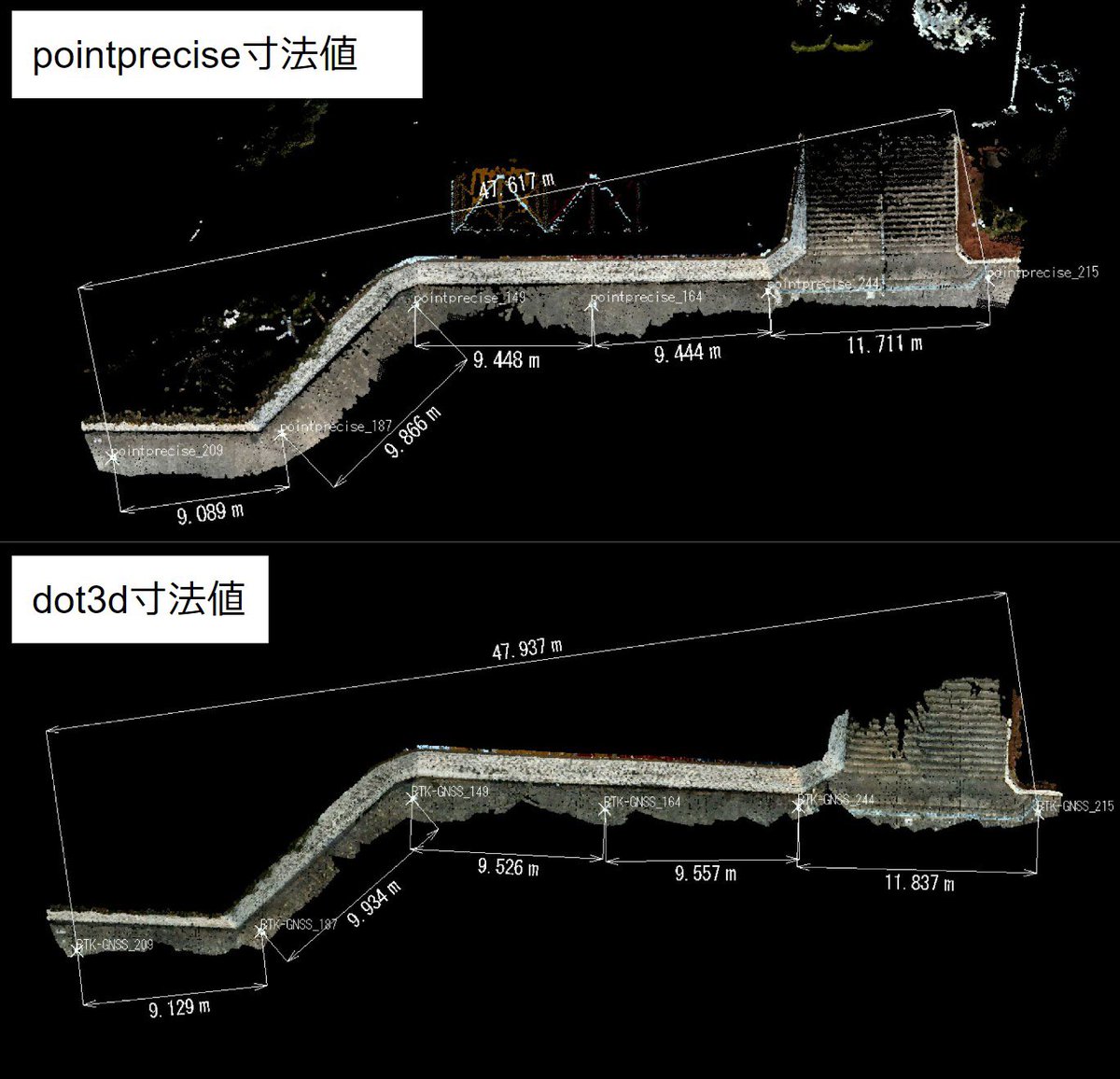
上が #pointprecise 下が #dot3d 、両者を比較してみた。
#pointprecise の寸法は、点群上でApriltag中央を選択し水平距離作成。
#dot3d の寸法は、別途 #drogger にてrtk-gnss してoptimize してるので、そのままrtk実測値から水平距離作成。
寸法の比較は実質rtkとの比較。
Last Seen Hashtags on Sotwe
hardcock
Seen from Saudi Arabia
wata
Seen from Turkey
قمرهم
Seen from Algeria
四爱小狗
Seen from Indonesia
วังม่วง
Seen from Thailand
momson() nolimit()* filter:native_video
Seen from United States
gainer
Seen from United States
หลุดคนดัง
Seen from Thailand
deadtoons
Seen from Malaysia
น้องมิรา
Seen from Thailand
Most Popular Users

Elon Musk 
@elonmusk
240.1M followers

Barack Obama
@barackobama
119.3M followers

Donald J. Trump
@realdonaldtrump
111.6M followers

Cristiano Ronaldo
@cristiano
108.7M followers

Narendra Modi
@narendramodi
106.9M followers

Rihanna
@rihanna
97.2M followers

NASA
@nasa
92.1M followers

Justin Bieber
@justinbieber
90.5M followers

KATY PERRY
@katyperry
86.7M followers

Taylor Swift
@taylorswift13
80.5M followers

Lady Gaga
@ladygaga
72.1M followers

Kim Kardashian
@kimkardashian
69.3M followers

YouTube
@youtube
68.6M followers

Virat Kohli
@imvkohli
68.4M followers

Bill Gates
@billgates
63.4M followers

The Ellen Show
@theellenshow
62.5M followers

CNN
@cnn
61.9M followers

Neymar Jr
@neymarjr
60.9M followers

X
@x
60.9M followers

CNN Breaking News
@cnnbrk
59.9M followers