$110M Series B. Cortex 2 is live. Boston is next.
200+ systems across Europe. 1B+ real production picks. 1 human intervention per 53,000.
We don't build robots. We ship the brain that runs on any robot.
Sereact has raised $110M in Series B funding. Cortex 2 is live. We're opening our first US office in Boston.
200+ systems. 1B+ real picks. 1 intervention per 53,000.
https://t.co/og4gcIRtcR
If you use GitHub (especially if you pay for it!!) consider doing this *immediately*
Settings -> Privacy -> Disallow GitHub to train their models on your code.
GitHub opted *everyone* into training. No matter if you pay for the service (like I do). WTH
https://t.co/vcSkhM5yLV
🚀 𝐒𝐜𝐚𝐥𝐢𝐧𝐠 𝐞𝐯𝐞𝐫𝐲 𝐝𝐢𝐦𝐞𝐧𝐬𝐢𝐨𝐧 𝐨𝐟 𝐎𝐒𝐒 𝐑𝐨𝐛𝐨𝐭𝐢𝐜𝐬! 𝐋𝐞𝐑𝐨𝐛𝐨𝐭 𝐯0.5.0 𝐢𝐬 𝐨𝐟𝐟𝐢𝐜𝐢𝐚𝐥𝐥𝐲 𝐋𝐈𝐕𝐄!
With over 200 merged PRs and 50+ new contributors, this is our biggest release yet. Whether you're working in sim or deploying on real hardware, v0.5.0 pushes the boundaries of open-source robot learning.
Highlights:
* 🤖 First Humanoid Support: Full integration for the Unitree G1, including whole-body control, locomotion, and manipulation!
* 🧠 New SOTA Policies: Expanding the zoo with Pi0-FAST (Autoregressive VLAs), Wall-X, X-VLA, and SARM for complex, long-horizon tasks.
* ⚡ Real-Time Chunking (RTC): Dramatically more responsive, real-time inference for flow-matching policies.
* �� Faster Datasets: New streaming video encoding means zero wait time between recording episodes, plus 10x faster image training.
* 🌍 EnvHub & IsaacLab: Load sim environments straight from the Hugging Face Hub, now featuring GPU-accelerated NVIDIA Isaac integration.
* 🛠️ Modernized Core: Upgraded to Python 3.12 & Transformers v5, plus a seamless new 3rd-party policy plugin system.
This is a massive leap toward general-purpose embodied AI. Read the full announcement in the Release Blog: https://t.co/GTHlBdmdw2
P.S. Keep an eye out... a big surprise is right around the corner! 👕👀
Unveiling our new startup Advanced Machine Intelligence (AMI Labs).
We just completed our seed round: $1.03B / 890M€, one the largest seeds ever, probably the largest for a European company.
We're hiring!
[the background image is the Veil Nebula - a picture I took from my backyard, most appropriate for an unveiling]
More details here:
https://t.co/eWHyGLXwCA
@inventorOli@GuillaumeLample J'aime le BAU sur le coin du bureau 😄
Autrement, je vois que vous utilisez des caméras fisheye sur vos Piper 👀 Vous n'avez pas eu trop de problème de performance des modèles en utilisant du fisheye vs des caméras plus "classiques"?
@brobotized Depends on industrial maturity in a region, but overall closing the gap between research prototypes and robust automation requirements. i.e.: In robot learning, developing models that are reliable, interpretable, and predictable enough for industrial deployment.
-the @SereactAI way-
The robotics world is slowly diverging from the previous consensus view that a research-only approach would lead to a ChatGPT-like breakthrough in the field.
Both recent pieces from @packyM and @oyhsu allude to a more step-by-step approach towards general robotic intelligence.
The reality is that real-world data is the only source where modalities, scale, and deployment distributions converge.
As such, exposing frontier robotics models directly to real production environments allows them to learn from live operations and align training and deployment distributions.
That's what then unlocks new use-cases (at the accuracy level customers demand), new embodiments, and the path to generalization.
Our portfolio company @SereactAI has been quietly building in this direction over the past couple of years, site by site deployment, scaling their real-world data loop while delivering outstanding customer value and unlocking new use cases and markets.
Not just demos. Real-world systems in production. All running on the same model, regardless of the use-case or robotic platform.
This is the way 🦾
We’re launching Cortex: adaptable robot intelligence for the real world.
Handles unknown items, works across robots, and learns from every deployment.
One model. Any robot. Real work.
Read more → https://t.co/59u8gLWRsp
Robots are finally leaving controlled demos and entering the real world.
The hard part isn’t showing a pick on stage. It’s making the same robot succeed when the light glares off plastic, the packaging deforms, or the bin is filled with objects it has never seen.
🚀 Glad to share UVT-RS, my first project in #Rust 🦀
It’s a set of crates for working with Uncrewed Vehicle Trajectory (UVT) files: read/write from ROS bags & MCAP and visualize in 2D and in 3D with @rerundotio.
#OpenSource#Robotics
https://t.co/f2Hg1V5DHS
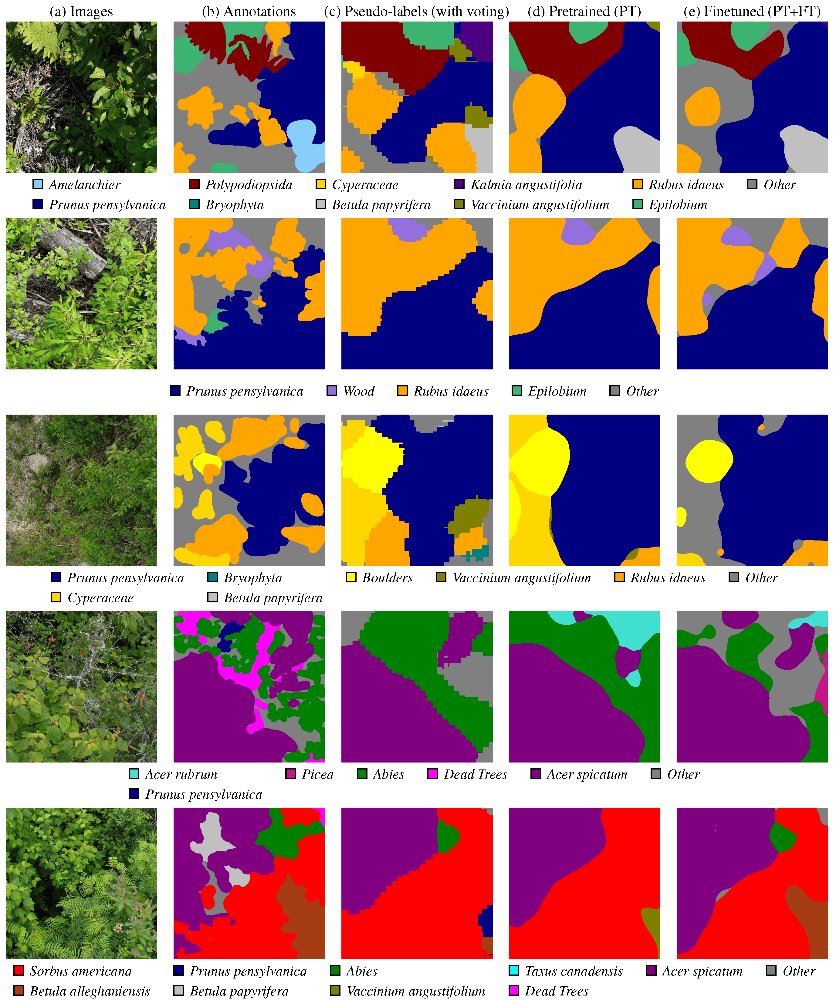
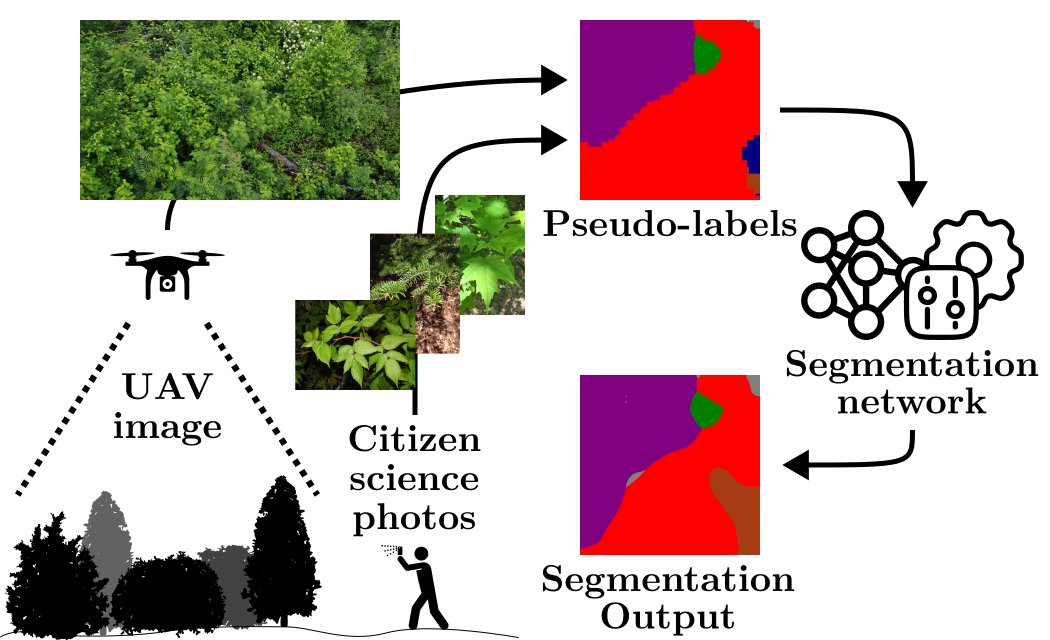
📢 New Paper Alert!
Using Citizen Science Data as Pre-Training for #Semantic#Segmentation of High-Resolution #UAV Images for Natural #Forests Post-Disturbance Assessment
Paper 📄: https://t.co/k5aFiZfrDW
Blog post 🌐: https://t.co/EWbaRYO6w2
Code 💻: https://t.co/FZwnM5jJwL
#AI
In this paper, we trained an image classifier on iNaturalist data to generate 140k pseudo-labels from #UAV imagery. The labels were used to pretrain and fine-tune a semantic #segmentation model, outperforming manual labeling for plant species segmentation🌲.
#RemoteSensing#CV
📢 New Paper Alert!
Using Citizen Science Data as Pre-Training for #Semantic#Segmentation of High-Resolution #UAV Images for Natural #Forests Post-Disturbance Assessment
Paper 📄: https://t.co/k5aFiZfrDW
Blog post 🌐: https://t.co/EWbaRYO6w2
Code 💻: https://t.co/FZwnM5jJwL
#AI