Excited to share that our paper on Concept Bottleneck Sparse Autoencoders (CB-SAE) will be presented at CVPR 2026 tomorrow!
CB-SAE combines sparse autoencoders (SAEs) with concept bottlenecks to make multimodal LLMs more interpretable and steerable.
1/5 Excited to announce that my paper “COMPAct: Computational Optimization and Automated Modular Design of Planetary Actuators” has been accepted at the #ICRA2026 🎉🤖
📄 Pre-print: https://t.co/jRl8WqAqOX
📂 Code: https://t.co/y0DGtQmqzd
🎥 Video: https://t.co/AM24cTE5fF
Using attention-based map encoding, we enable robots to traverse extremely sparse terrains. We are now developing a new architecture that explicitly plans contact points, rather than latent representations, enabling whole-body contact planning for humanoid robots. Stay tuned.
Excited to share that I'll be at #NeurIPS2025 from Dec 2-7, presenting two of my works 🚀
1. LLM Agent Safety Against Prompt Injections
2. Anomaly Detection Using VLMs
I’m looking for PhD positions starting Fall 2026.
Happy to connect, feel free to DM :)
Poster details in 🧵
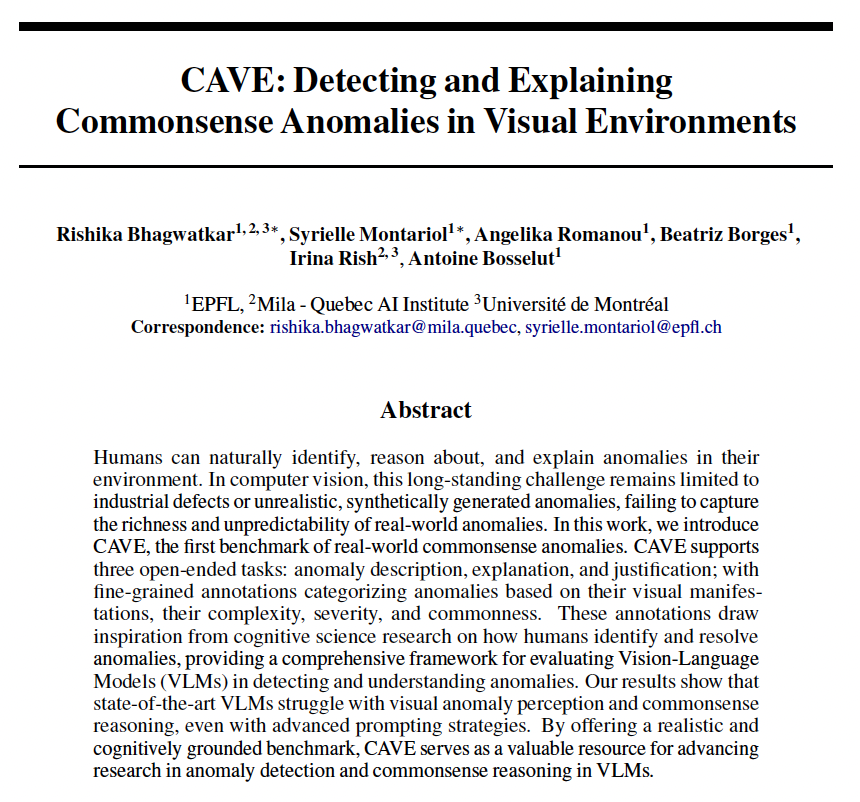
🚨 New Paper Alert!
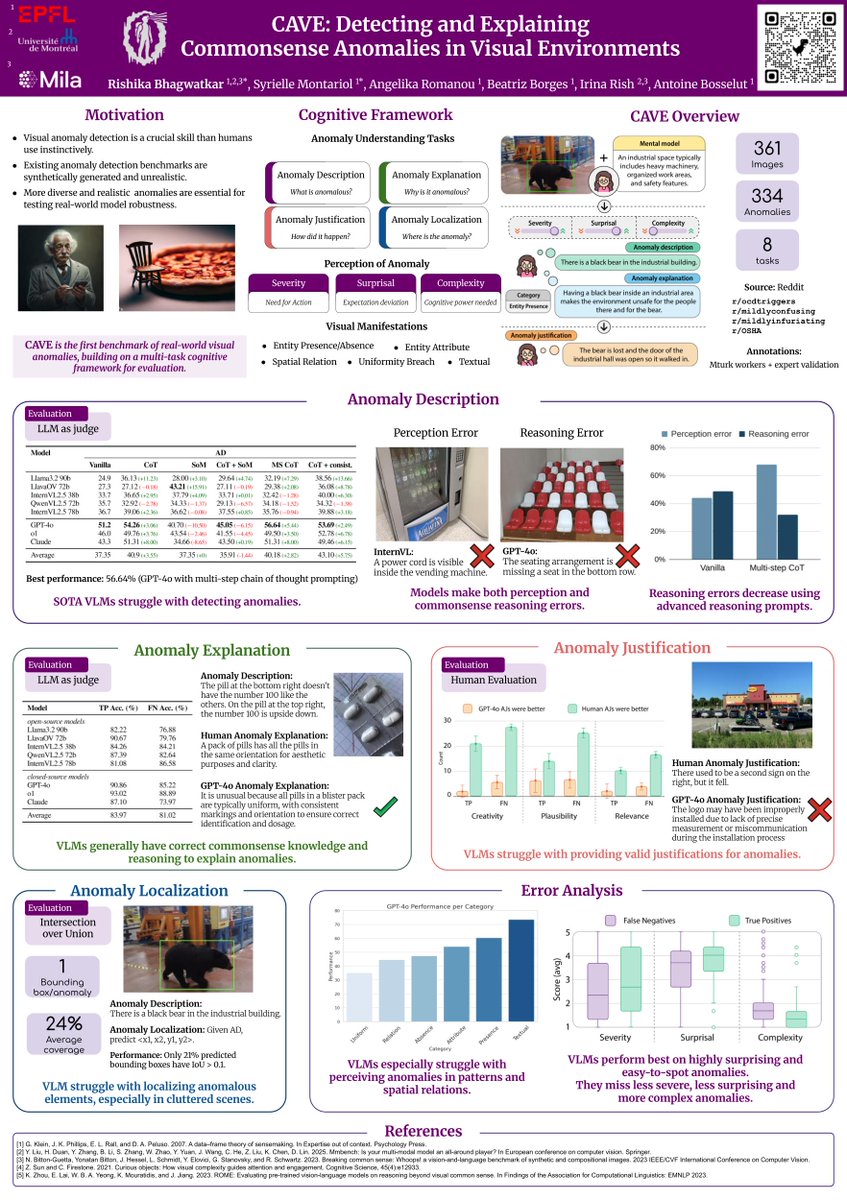
🚀 Excited to introduce CAVE: A benchmark for detecting and explaining commonsense anomalies in real-world visual environments!
Accepted at #EMNLP2025 Main Conference! 🎉
📍Join us at our poster on Nov 5, 16:30-18:00 in Hall C.
Implementing motion imitation methods involves lots of nuisances. Not many codebases get all the details right. So, we're excited to release MimicKit!
https://t.co/7enUVUkc3h
A framework with high quality implementations of our methods: DeepMimic, AMP, ASE, ADD, and more to come!
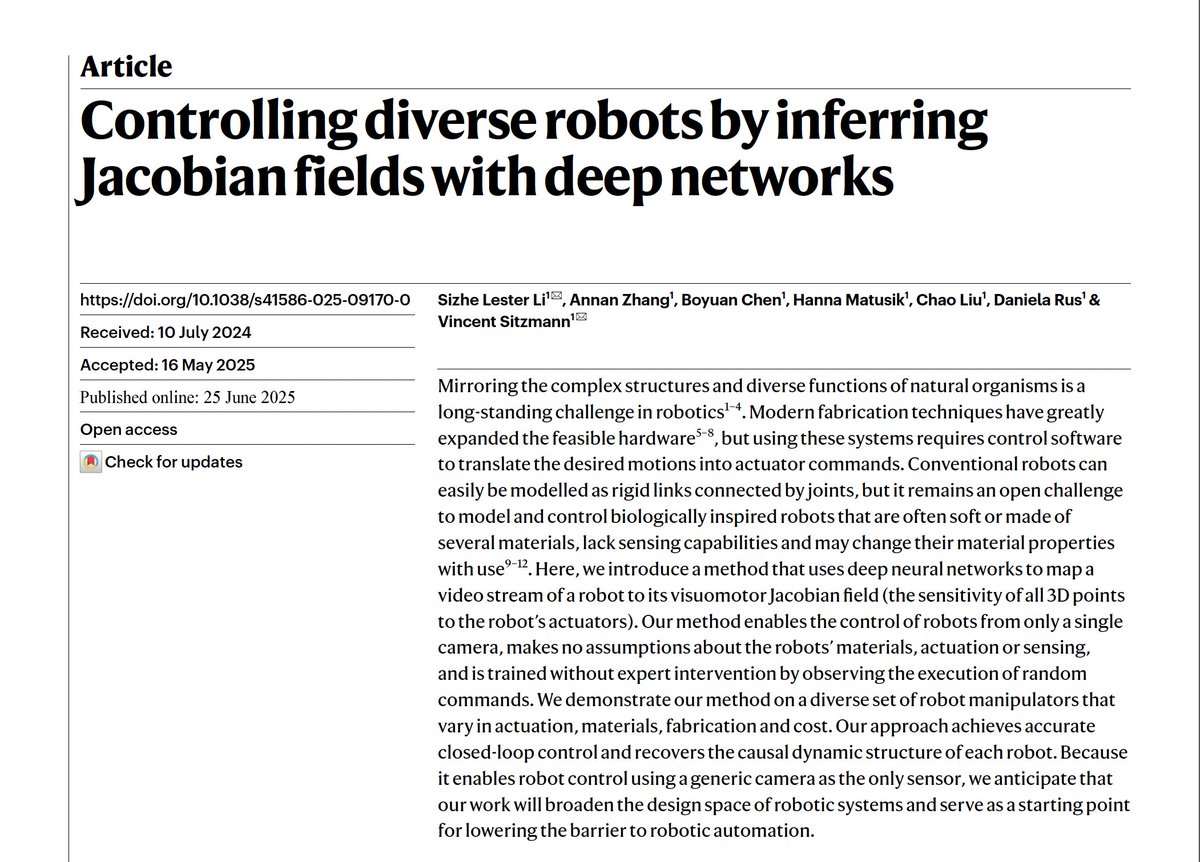
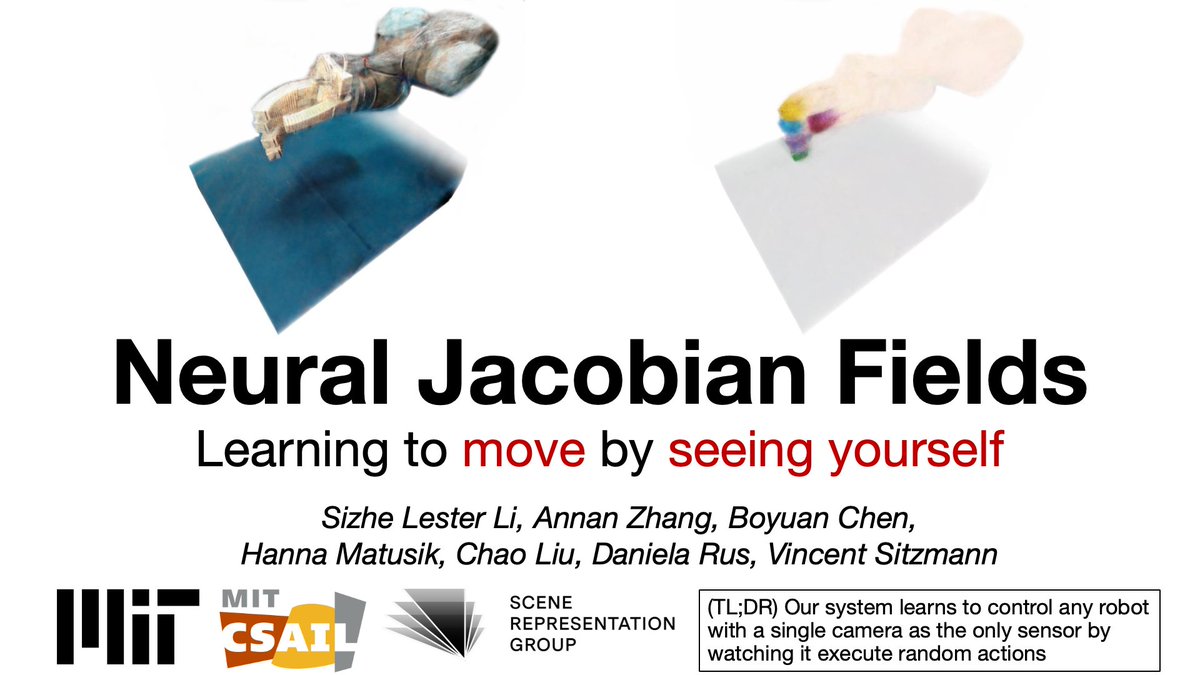
Now in Nature! 🚀 Our method learns a controllable 3D model of any robot from vision, enabling single-camera closed-loop control at test time! This includes robots previously uncontrollable, soft, and bio-inspired, potentially lowering the barrier of entry to automation!
Paper: https://t.co/43qHC9sxZI
(1/n)
🥋 We're excited to share judo: a hackable toolbox for sampling-based MPC (SMPC), data collection, and more, designed to make it easier to experiment with high-performance control.
Try it: pip install judo-rai
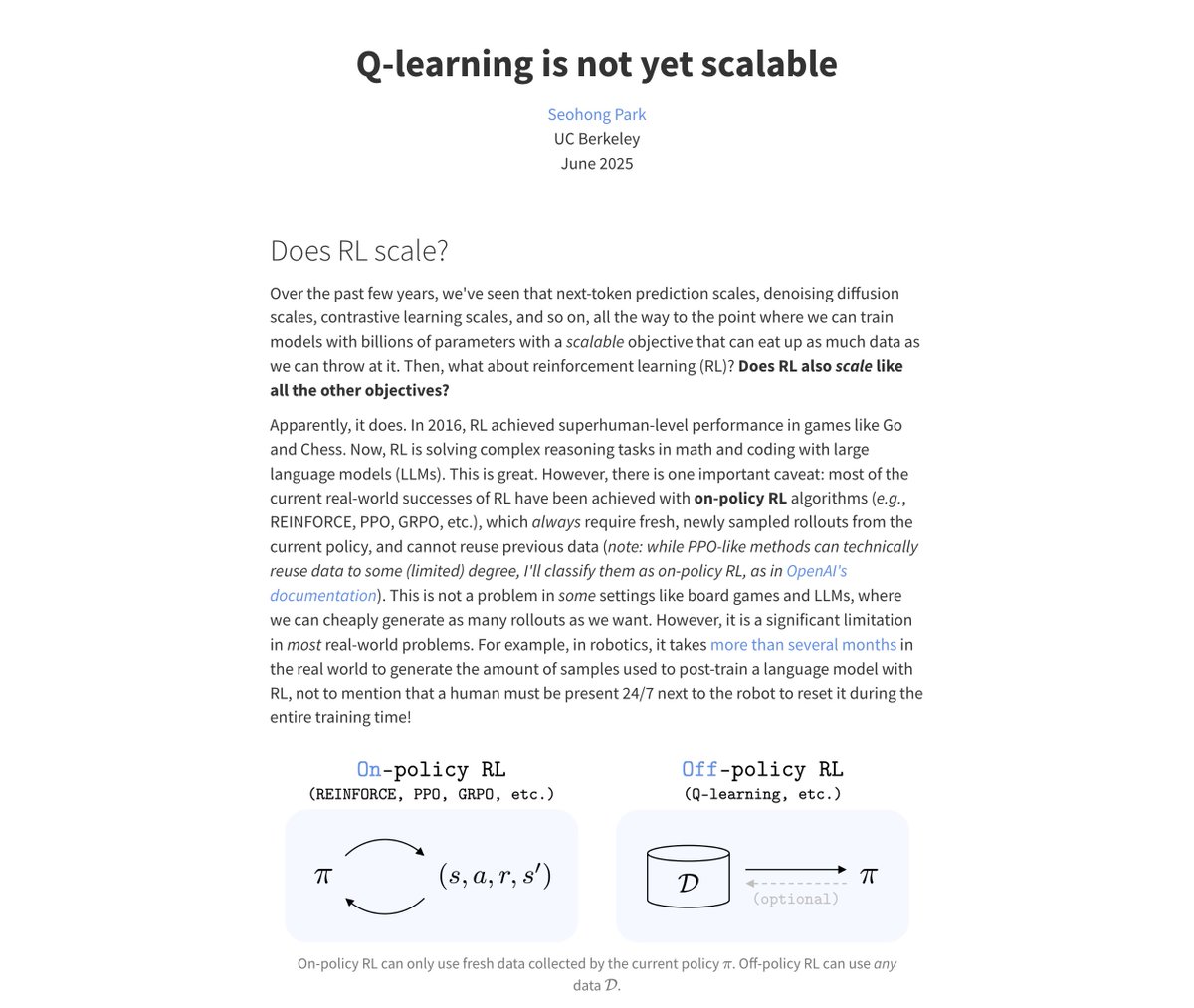
Q-learning is not yet scalable
https://t.co/hoYUdAAeGZ
I wrote a blog post about my thoughts on scalable RL algorithms.
To be clear, I'm still highly optimistic about off-policy RL and Q-learning! I just think we haven't found the right solution yet (the post discusses why).
⚡Interested in making pretrained generative models interpretable with minimal training and annotations?
I'll be presenting our paper, Interpretable Generative Models through Post-hoc Concept Bottlenecks, at #CVPR2025 today in Poster Session 2 (4 pm - 6 pm CDT) at poster #266!
17/n If you’ve made it here, thanks a lot for your precious time🤗. Also, a big thanks to all of my co-authors (Naman Saxena, Kishore Chandra, Shishir N Y)
A 🧵 on our recent work at #ICRA25.
PIP-Loco: A Proprioceptive Infinite Horizon Planning Framework for Quadrupedal Robot Locomotion (https://t.co/RuwznzrG3c)