@wedtm yeah, you can get true $40 total cogs on eBay, but I wanted to show same platform for comparison
And if you’re sourcing for medium scale on ali, a lot of the true cost is genuinely baked into the shipping price
androids provide cellular connectivity, direct usb access, a camera, battery, and screen — everything you might need to deploy your robots in the wild!
plus the (resale) supply is flooded and the industry is mature so they’re MUCH cheaper than comparable ‘dev friendly’ systems
right monitor is 20 codex instances. left monitor has situational awareness on autoscroll. center monitor is my word doc mainfesto. two keyboards, one for both hands. left airpod is dwarkesh x eric jang, 3x speed. right airpod tchaikovsky. meta quest 3 overlays my HUD: heart rate, words per minute, blood caffeine content. one assistant hooks me to an iv of chinese peptides, cocktail. the other feeds me kimchi. my unitree robot steps in when my posture slouches. blue light beams down on me in my herman miller chair. efficiency. no wasted movement. no wasted thoughts. think you can keep up with me? good luck. this is just for my morning emails.
polylactic acid has c. 0.5 dB/cm attenuation at 2.45Ghz - meaning you can just microwave thermoplastic parts if you need to make a quick fit adjustments! (carcinogen risk—even with bioplastics)
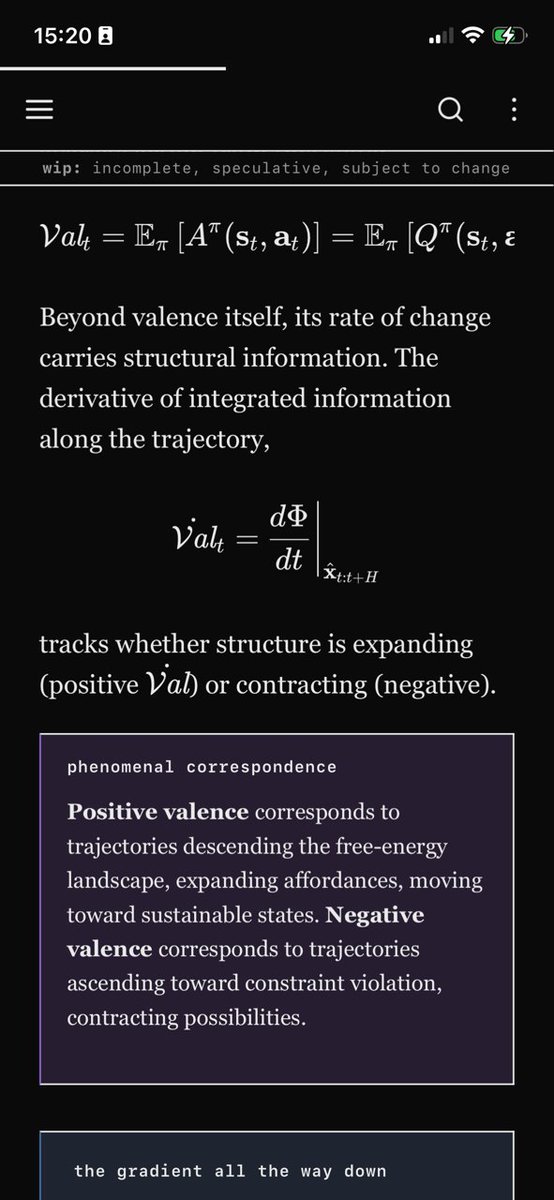
- when the self model emerges from a world model identifying itself as another first class entity inside the world it models (I.5)
- when affective geometry is defined within the space of self-modeling structures (II.3)
- when we orient ontology around causal structure
If you think that LLMs are conscious you must accept a lot of weird conclusions. Like:
- we can clone conscious experience
- we can reverse time in conscious experience
- we can pause and resume conscious experience
- we can distribute conscious experience in space
Two weeks ago, watching Agnessa Pedersen mind control a drone in real time, was one of the most moving moments in my career. Agnessa is a rare and wondrous human working towards a wild future.
(5/5): what i want to emphasize from this weekend is that the bottleneck for embodied intelligence rn is probably not “reasoning” in the abstract
it’s calibration, instrumentation, feedback architecture, and the enormous hidden labor required to turn any unstructured region of reality into a robot’s domain
we humans barely notice this because our own origins and civilization already spent enormous intelligence building the scaffolding for us
robotic systems only inherit a tiny subset of that structure for free. but once you ask an agent to directly interface with reality itself, all that hidden labor comes crashing back into the objective. you can’t yet just ask claude to “identify and fix all bugs”; the system has to negotiate its own contact with reality
and i think that is where things start becoming scientifically interesting. if you think so, please give me feedback on https://t.co/xBAHnwZkBK 🙏
and huge thanks again to Prateek Mehta and Yoyo Yuan (@adiabaticgarden) for working with me!!!!
(4/5): so i know the thesis was all about robots actually touching reality but these failures partially pushed us BACK into simulator territory
once grasping became the bottleneck, we stopped focusing on the higher level goals we wanted to achieve and just worked on infrastructure around the robot and world state itself:
we explored some vla-based approaches for higher frequency control as well as building some infra for data collection, train, and replay. and in more desperate moments even teacher-followers mirroring
Chem-0 Lab Console got a major overhaul during this process. “worlds” became first-class abstractions: one or more physical or virtual worlds, multiple robot arms assigned to worlds, multiple cameras assigned to worlds, workspace editing, scene inspection, asset libraries, trajectory replay, multi-arm orchestration
you could connect multiple physical SO-101 arms simultaneously while also running multiple virtual worlds side-by-side for debugging and experimentation
there was even a workspace editor where you could drag robot arms and objects directly into scenes and inspect environments through attached cameras
Chem-0 Lab Console started feeling less like “robotics software” and more like a tiny Scale AI for embodied-agent data collection