Yeah I think that's the solution, tag on the back, static base_link -> tag transform
As soon as glasses see the tag - you can publish the newest glasses -> tag transform, so you can transform between robot frame and glasses frame
(IDK what glasses actually give you so might be missing something)
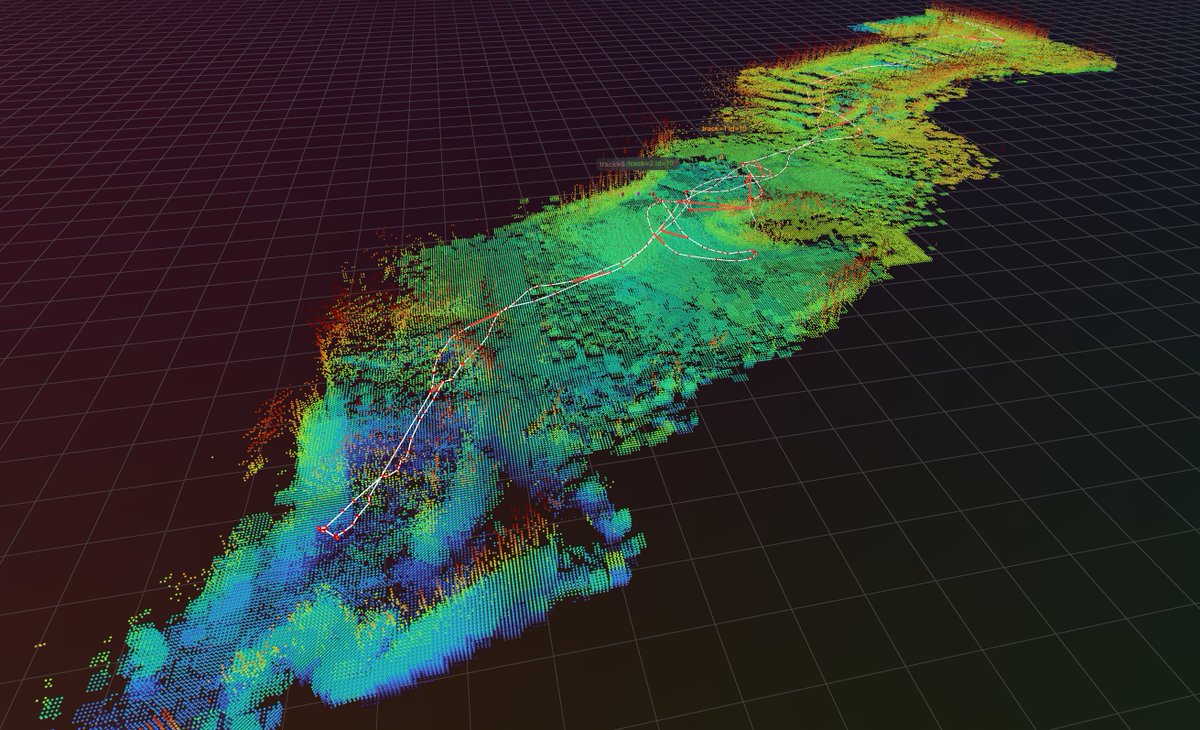
Just to know what's coming that I'm excited about, we are doing a lot of work on mapping and nav on go2 specifically (loop closure, map saving, relocalization) so this will land soon, as well as some tooling for easier dev and running of algos on actual stored data
https://t.co/tCLU5yi5aK
https://t.co/2ww4wMYitl
Great, lmk if you run into any issues, we are young.
How are you localizing yourself in relation to the robot? Hardcoded?
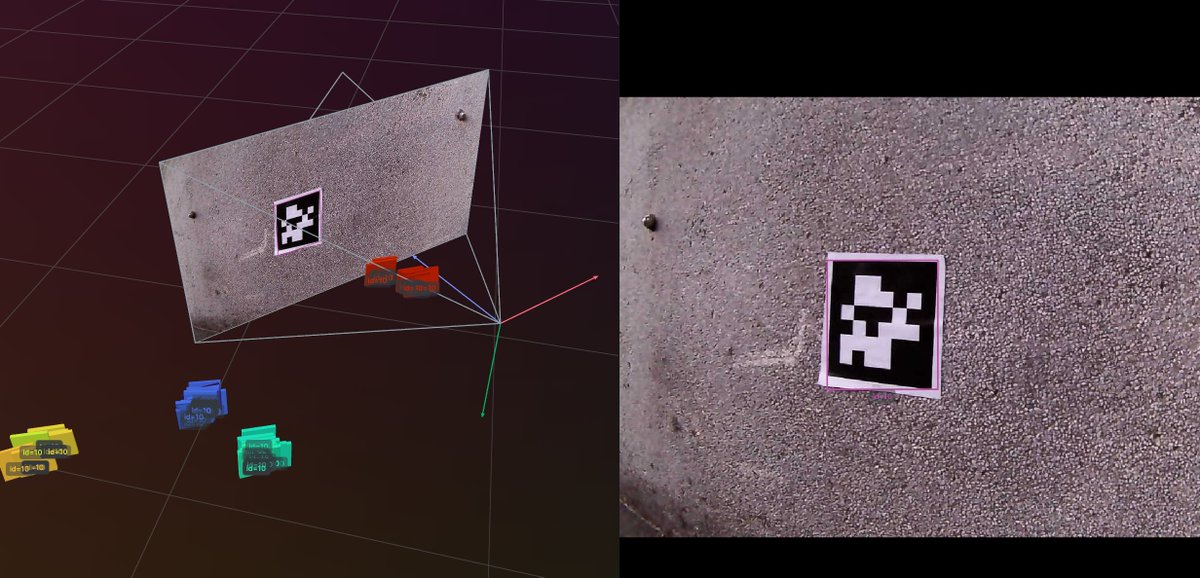
We just wrote some stuff for apriltag detection, so if you have a tag on the robots back, your glasses can tell where it is in relation to them.. unfortunately not documented yet
https://t.co/5FAUrqyFDC
https://t.co/D9MZYRAzK7
https://t.co/ilu12LEHC6
if you hang on our discord can ping us for guidance
Really great usecase for autoresearch I've found is writing a basic nav algo (loop closure, relocalization) establishing ground truth for scoring (apriltags in this case) then autoresearching until score is perfect