Here is what went into decision making for the custom nav stack.
1. For a month we iterated with various nav stacks in and we will be iterating more and changing according to conditions.
2. we are trying to make navigation self iterable with auto simulations, hard to build.
Progress update @mamarobotics
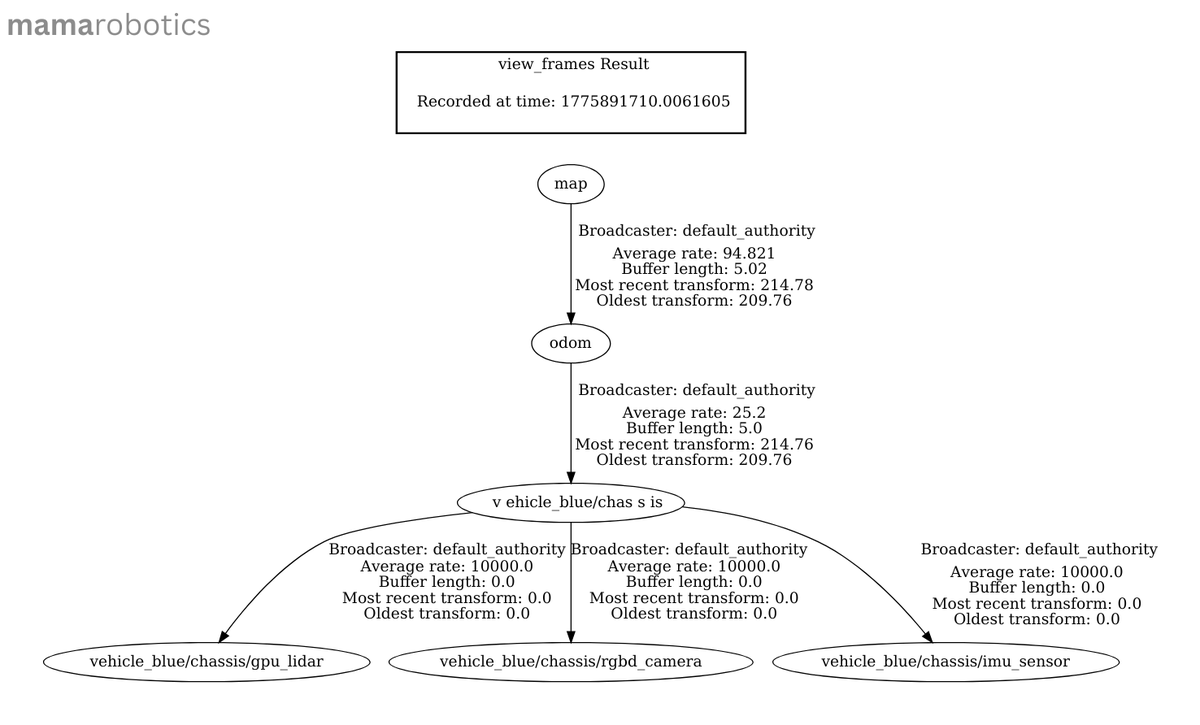
Hybrid SLAM : Google Cartographer for efficient 2D mapping, loop closure and localization→ RTAB-Map strictly for 3D visualization layer.
Stable real-time 3D mapping in RViz2 + full Nav2 integration achieved.
It took so much for us to reach here, cannot be defined in words.
From months of road trips, to 4 am orders to building- rebuilding team from scratch.
No matter what, we shall make sure the story will be epic.
Still its day 1, we get back to building now.
1. Started from the bottom… now we’re here in a tier-2 town, building @mamarobotics .
It’s been 3 years since I left Bangalore and moved back to my village, Pathri ❤️- a small place with just 62 homes, in Yavatmal, MH.
Life took a literal U-turn. Things went south. Really south.
Progress at @mamarobotics
While building our custom NAV stack. We combined the SLAM framework of Cartographer with RTAB-Map's depth camera processing, instead of just one. The result: Efficient, precise mapping using the best of both worlds.
🤖 #Robotics#SLAM#nvidia