Working with Tim has been a real pleasure, both professionally and personally.
This is a milestone well earned—and I’m honored to have been part of his journey. 🎓🤖
#PhDGraduation#TUM#RoboticsResearch
It’s a great pleasure and proud moment to congratulate @TimSalzmann on the successful defense of his PhD thesis at @TUMunich!
We’re celebrating not just this milestone, but years of dedication, hard work—and a truly great time together. #PhDDefense#Robotics
My sincere thanks to Marco Pavone, Johannes Betz and Martin Werner for reviewing Tim’s thesis and their valuable participation in the defense.
@drmapavone@joebeatzhoven@trajcomp
🤖 PhD Opportunity in Aerial Manipulation! 🚁
Our team is seeking a passionate PhD student to join us in the field of aerial robotics.
Requierments: Control, Programming
- Application Deadline: 12.10.2024
- Start Date: 01.01.2025
https://t.co/5OeaFoixUJ
Feeling humbled and excited that I've received the prestigious Heinz Maier-Leibnitz Award from #DFG! 🥳 This is not just a testimony to my research but to the continuous support of my family, friends, colleagues, and mentors. A heartfelt thank you to each and every one of you!
L4CasADi seamlessly integrates optimal control with computer vision models, empowering you to tackle complex problems with ease.
[Link to Colab Example][https://t.co/IQB7IN8Vjh] [Link to paper][https://t.co/jrX04Baxqa]
Credits go to: @TimSalzmann@jonarriza96@drmapavone
Unlock the power of data-driven models in numerical optimization and optimal control with L4CasADi! :rocket:
Check out our latest example showcasing how L4CasADi can optimize a collision-free trajectory through a learned Neural Radiance Field (NeRF).
#OptimalControl#L4CasADi
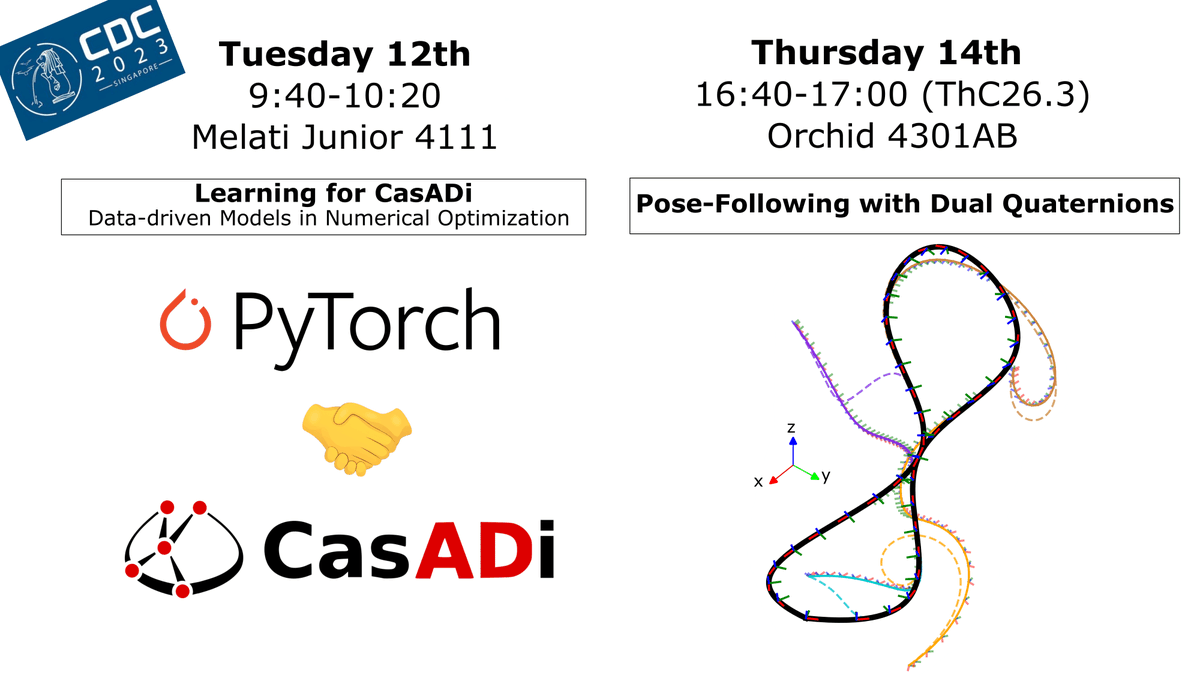
Attending @IEEECDC2023 in Singapore? Come to our talks!
◾ Learning for CasADi ➡https://t.co/ToT6qBh174
◾ Pose-Following with Dual Quaternions ➡ https://t.co/JbDKuBzD7G
#CDC23@MarkusRyll@TimSalzmann
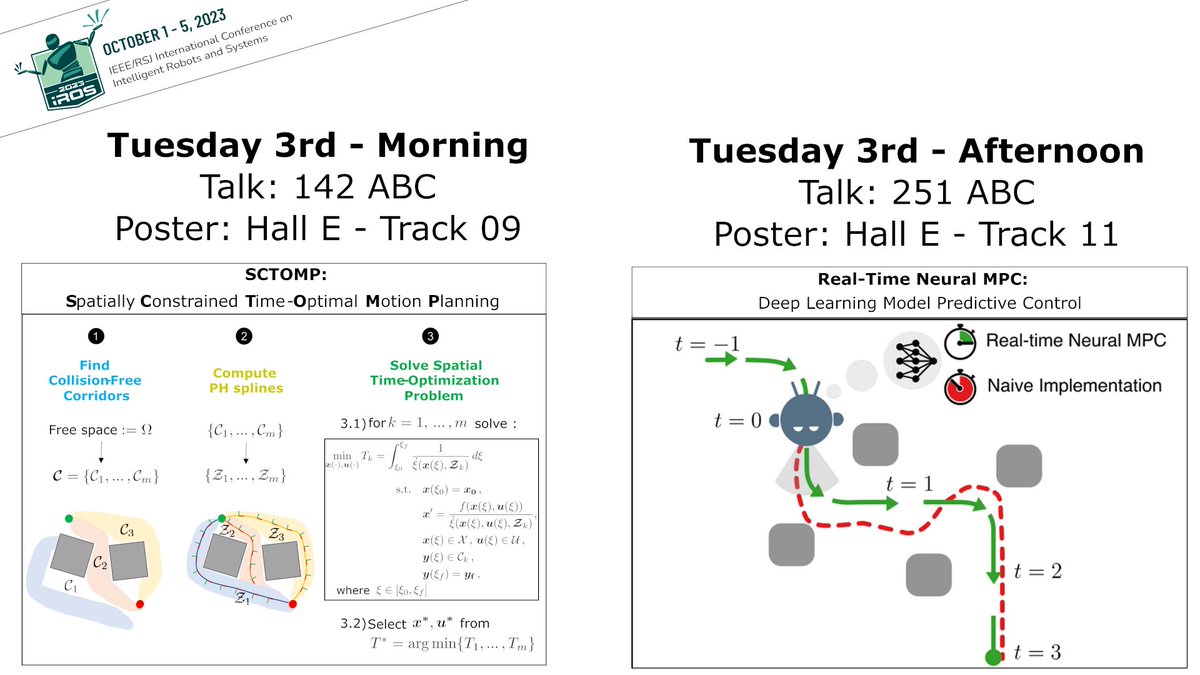
My PhD students @jonarriza96 and @TimSalzmann are presenting their work on Motion Planning and Neural Control at #IROS2023, tomorrow:
- https://t.co/FtSYRPp2ht
- https://t.co/lceFs2UTMn
See you at the posters!
#Robotic#MIRMI#TUMunich
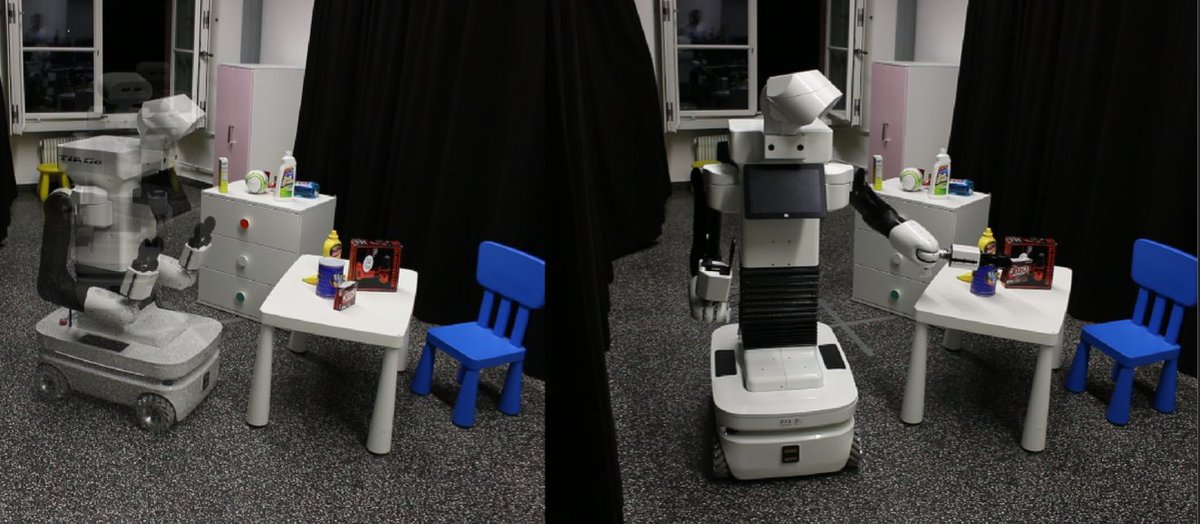
My group @CS_TUDarmstadt has several open #PhD positions on a variety of topics encompassing Interactive #Robot Perception and Learning for Mobile Manipulation Systems -- positions funded by @dfg_public and @HorizonEU
Apply now and join us! https://t.co/HFlGjFfw5m
In our Real-time Neural MPC paper, we leverage network capacities 4000x larger in optimizations. We now release L4CasADi, which enables easy integration of PyTorch models in optimizations on CPU and GPU, supporting fast C code generation and seamless integration in Acados.
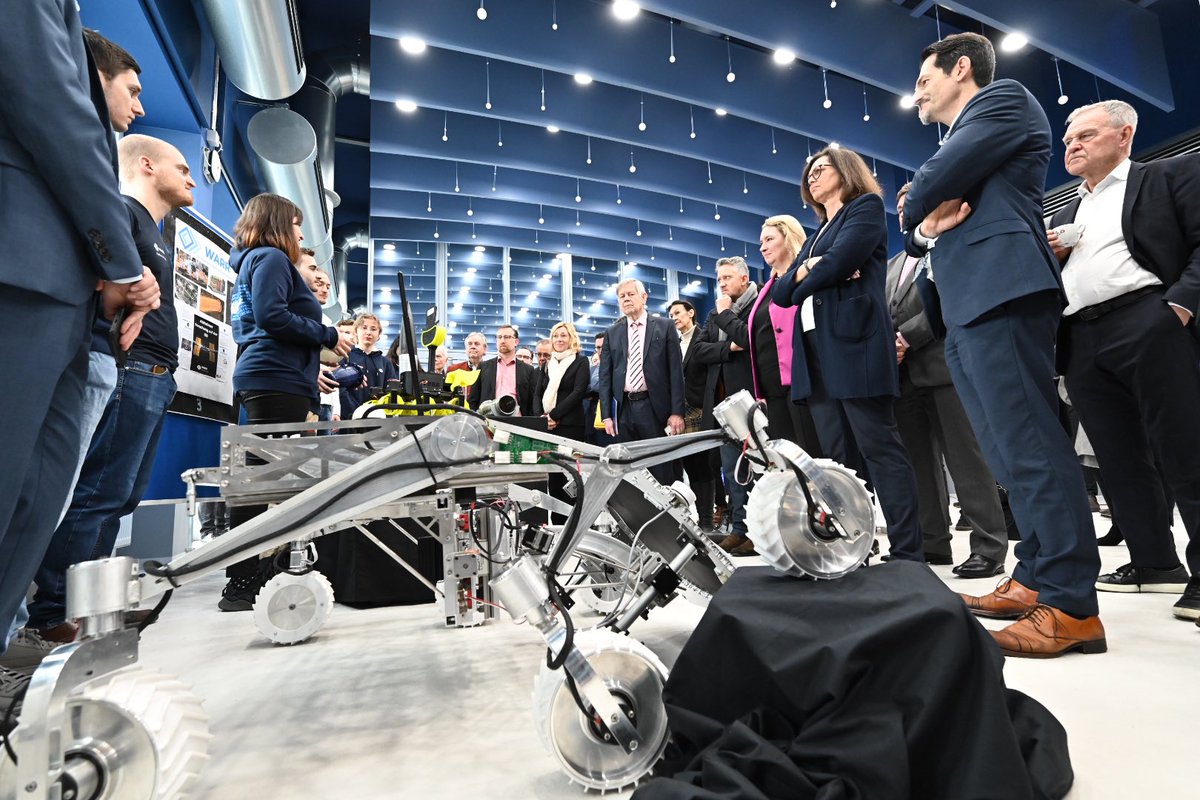
Im Department Aerospace and Geodesy der @ed_tum informieren sich die Abgeordneten über Forschung im "Space Valley":
🚀Raumfahrtantriebe & Mobilität
🤝Arbeitsgemeinschaft @WARR_TUM
🌳Resilienz des Amazonas
🫧Wasserstoffantrieb
⚙️Hochagile Fahrzeuge
🌕Lunar Volatiles Scout
We are excited to announce the Tartan Planning Series (https://t.co/qLFC4YtEXJ), an interactive series of talks and learning on planning for robotics!
Sign up (https://t.co/KEQyVSGvwt) to receive reminders and Zoom links to participate.
With Real-time Neural MPC you can efficiently integrate large, complex neural network architectures as dynamics models in an MPC-pipeline. Compared to prior implementations we can leverage neural networks with a 4000x larger parametric capacity in a 50Hz real-time framework.
I feel very honored that my chair has been awarded with three teaching #Awards by the Student Council for Aerospace and Geodesy of #TUM. Congratulations to @jonarriza96. It is a pleasure working with great students and collegues.