Teaching a robot shouldn't require humans to act like robots.
Human demonstrations contain valuable signal for robot manipulation, but they aren’t directly transferable to robots.
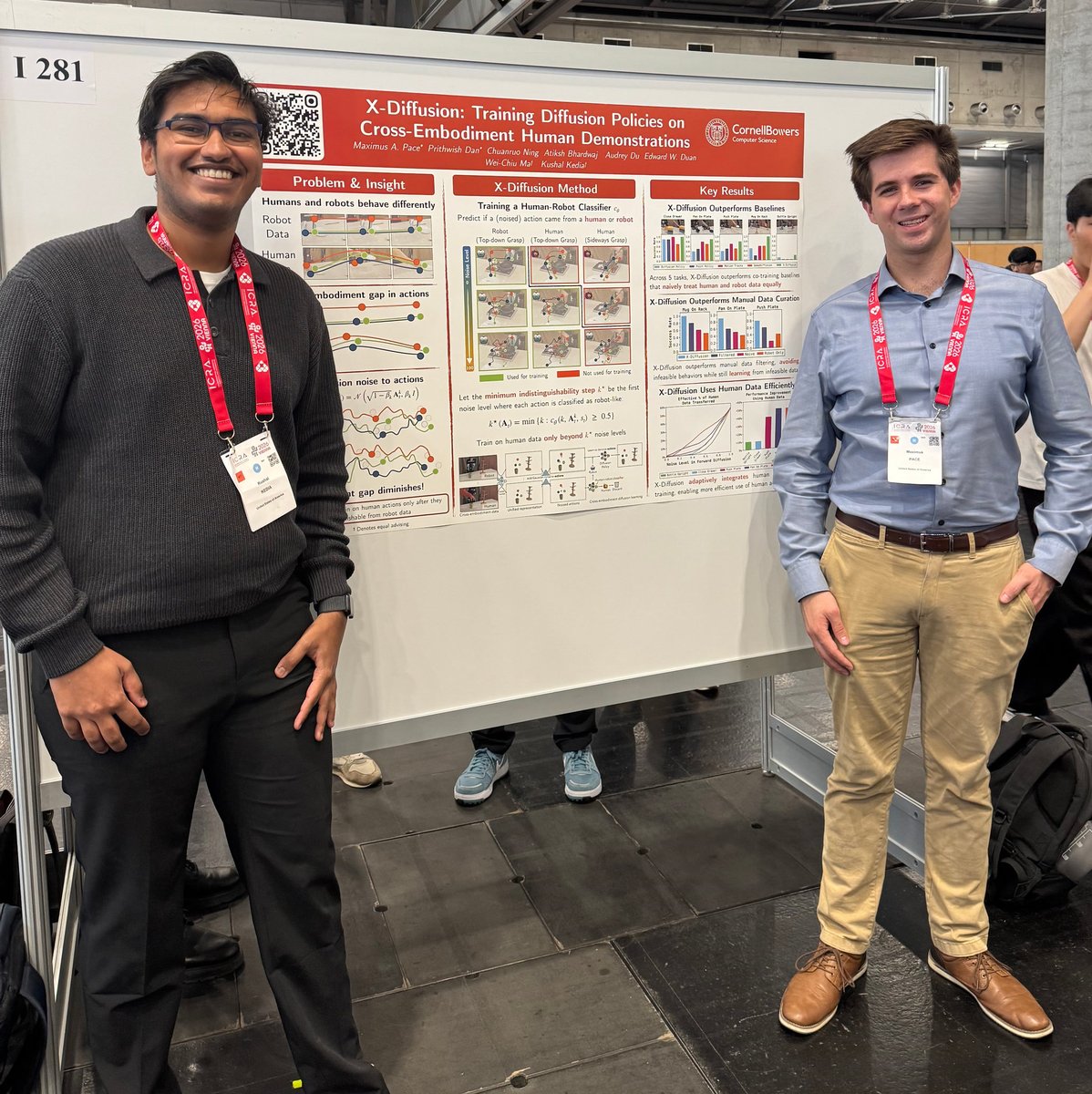
X-Diffusion learns from noisy human demonstrations while staying within the robot’s capabilities.
🤖 How can we teach dexterous robots to perform precise, contact-rich assembly?
Introducing Play2Perfect: first learn to play with objects, then perfect the policy for tight insertion, multi-part assembly, and screwing.
Sound on! 🔊
🧵👇
Huge thanks to my collaborators @prithwish_dan (co-lead), @TritiumAc, Atiksh Bhardwaj, Audrey Du, and Edward Duan, and to @weichiuma and @kushalk_ for their guidance and support.
We recently presented at ICRA 2026!
Check out our project website + code: https://t.co/Q3DQN3AsZ1
Ambient Diffusion is useful for learning from not just human videos but also suboptimal data. Check out this closely related robotics work from the authors of Ambient Diffusion! 👇
https://t.co/1rxgzBDDpj
🤖 We introduce Ambient Diffusion Policy, a simple and principled method for training policies with suboptimal data in robotics.
Suboptimal data is everywhere in robotics…
❌ Data filtering is wasteful
❌ Co-training learns both good and bad features
✅ Ambient Diffusion Policy selectively learns useful features via noise-dependent data usage
👇🧵(1/5)
Can we build generalist robots with zero teleoperation? Come participate in the discussion and weigh in at our ICRA'26 workshop, BeyondTeleop, starting at 8.45 am CEST today (June 5th)!
📍 Strauss 3
Human videos 👩 are noisy and break standard imitation learning.
X-Diffusion selectively trains on noisy human data to learn skills while maintaining robot feasibility 🦾
Come check out our poster at #ICRA26
Interactive Session 6 − ThI2I Hall C - 3-4:30 p.m.
🤖 Can a single robot policy manipulate diverse tools without ever seeing them before?
Introducing SimToolReal 🔨 : a generalist dexterous manipulation policy that transfers zero-shot sim→real to unseen tools + unseen tasks
All videos are 1x speed (60 Hz control) 🧵👇