Skip the happy hour at #CVPR2026. Come play 1v15 chess, eat too much baklava, and talk AI with us. ♟️🍮
Our CTO IM Varun Krishnan (FIDE 2405) takes on 15 challengers at once. Our CEO can't beat a bot but serves a mean baklava.
📍 Hyatt Regency Denver, Mineral Hall A
📅 Fri June 5, 4–7 PM
RSVP: https://t.co/x20YOPLzPY
Nomadic AI is heading to #ICRA2026 in Vienna (June 1-5)!
Stop by Booth S00B to see how we turn raw, multimodal, multirate interaction data into searchable, actionable intelligence automatically.
✦ Automatically surface failure modes ⇒ no costly manual review
✦ Segment every motion instantly ⇒ cut annotation time by hours
✦ Detect complex and ambiguous motion patterns ⇒ catch what manual review misses
Want to see it in action?
We look forward to meeting you in Vienna!
#ICRA2026 #Robotics #NomadicAI #PhysicalAI
Robotics teams are sitting on a goldmine they can't access. 🤖
95% of fleet video sits in archives, waiting for a human to find the one moment that matters.
That's why physical AI is stuck at demo stage.
Nomadic AI turns raw footage into training signal. ⚡
1/@Waymo's recent pothole mapping partnership with @waze is a great example of vehicles becoming infrastructure observers.
The next unlock is making this work beyond AV fleets with specialized sensor stacks.
With Nomadic, ordinary dash cam footage can become mapped road events: potholes, hazards, blocked lanes, damaged signs, and more.
2/ This is the kind of workflow Nomadic’s agentic platform enables.
It infers mapping intent from the query, inspects the videos for potholes and GPS overlays, and maps the events automatically.
@AlexanderJoh10 Certainly! We can for example auto-segment an industrial welding instance.
Check out this example on our platform: https://t.co/rtlJn47LaO
The future of computer vision is agentic.
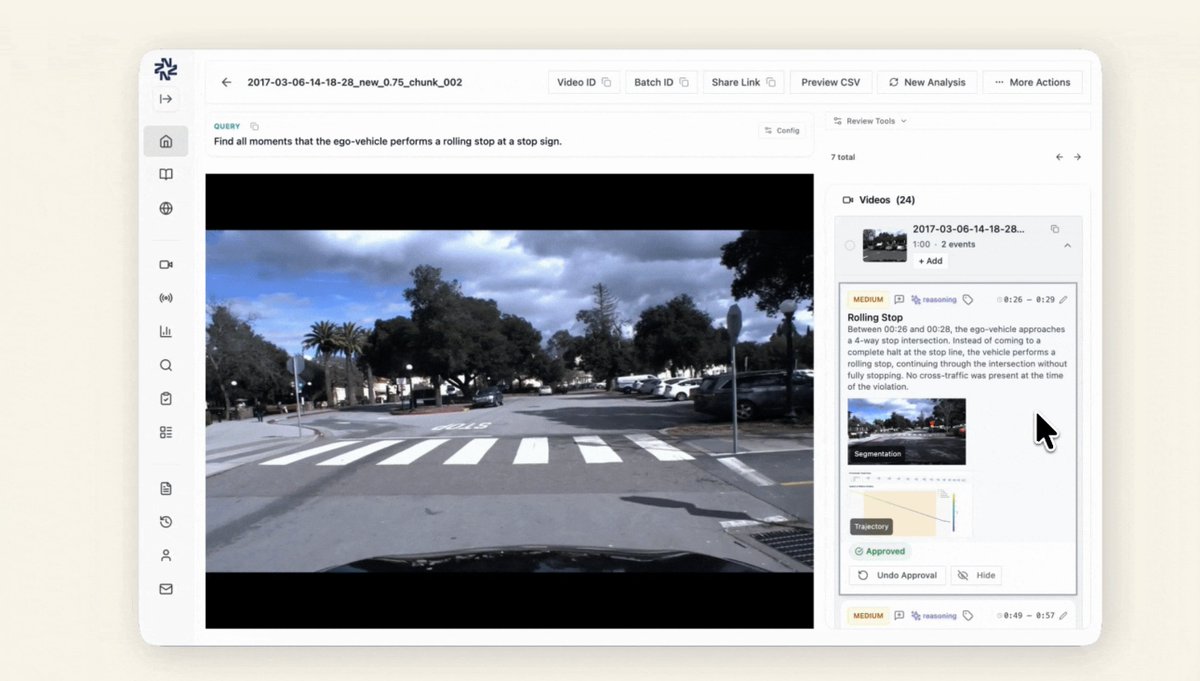
1/ We built Nomadic around a gap we kept seeing in video understanding: VLMs generate chain-of-thought that's fluent and often correct in structure, but weakly grounded in what's actually in the video.
This limitation shows up in cases like "rolling stops". Is the stop sign actually associated with the vehicle’s lane? Does the ego vehicle ever come to a full stop, or only decelerate?
The future of computer vision is agentic.
1/ We built Nomadic around a gap we kept seeing in video understanding: VLMs generate chain-of-thought that's fluent and often correct in structure, but weakly grounded in what's actually in the video.
This limitation shows up in cases like "rolling stops". Is the stop sign actually associated with the vehicle’s lane? Does the ego vehicle ever come to a full stop, or only decelerate?
@BenjaminDEKR Appreciate it, @BenjaminDEKR. Airplanes don’t fly by flapping like birds, yet they’re essential infrastructure!
Our system is helping many teams to make sense of their video. See it in action here:
https://t.co/1TbZcPTddv
4/ We're looking for talented researchers, engineers, and biz-devs who want to build the agentic visual data engine.
At ICLR this week? Come find us Thu 4/23, 12:15 PM, Room 208: https://t.co/EoMbfigvCC
https://t.co/p2m5g0IRz8
3/ Teams in autonomous driving, robotics, and construction use Nomadic to uncover edge cases, build higher-quality training datasets, and keep watch over their deployed fleets.
Already used by Zoox, Mitsubishi Electric, Zendar, and NATIX. Video stops being an archive. It becomes a system that continuously surfaces signal you can trust. 🤖
Read more → https://t.co/uCLJ0bHmje
TechCrunch article → https://t.co/9oQf7oKPFC
#PhysicalAI#Robotics#NomadicAI
The validation step is what makes it usable. Every candidate event is treated as a hypothesis. The system actively looks for ways it could be wrong, and only surfaces it when alternative explanations fail.