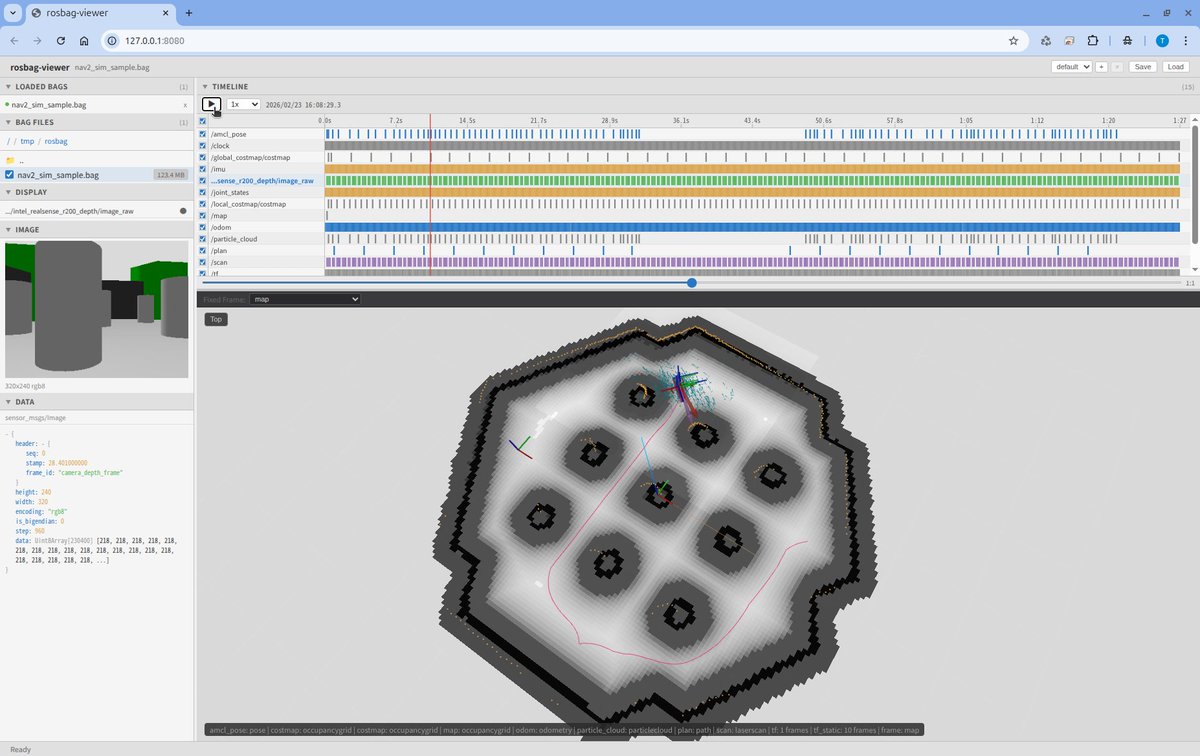
Weekend project: Yet another ROS1 bag viewer. Standalone binary via Rust & React. Just run it to open in your browser (Linux/macOS/Win).
Robots powered by ROS1 are still out there working hard in the field! 🔥🤖🧹
Check this out: https://t.co/gQT4tvnaX7
#ROS#ROS1#Robotics
Intrinsic has joined @Google to accelerate the future of physical AI!
As a distinct group working closely with other teams across Google, we’re excited to continue evolving the @IntrinsicAI platform to build the Android of robotics.
Learn more: https://t.co/ciTCX0S7CH
Another weekend side project: time-optimal trajectory planning for robot docking.
Curious how much time optimal control can actually save.
Code: https://t.co/oCUHxzLiJm #Robotics#Python#Kachaka
Implemented a quick experiment: tfl (tf light) — an experimental mutex-free tf2 alternative for ROS 2.
Exploring non-blocking single-write and multi-reader operations for high-frequency transforms.
Check it out here: https://t.co/MvcixivYRw
#ros2
Just started for a tech talk demo, but I couldn't stop.
Write async ROS 2 code that reads like sequential code—no callback nesting, no deadlocks, no state machines. C++ coroutine magic on a single-threaded executor.
https://t.co/PD7bwdj6Ep
https://t.co/Ewiwnr6B63 #ros#ros2#cpp