@DRoboticsDev
Open-source full-stack humanoid framework ROBOTO_ORIGIN from RoboParty is coming under the spotlight! Join our free live webinar (14:30 GMT) to learn the project from our design lead Junjie. Register: https://t.co/ZTNBkeIQ06 #RoboticsDevelopment#OpenSource
🤖 Check out concept clips of our open-source full-stack humanoid ROBOTO Origin!
We’ve received user replication cases and are now calling for more participants.
Our prototype is being iterated continuously — stay tuned for updates 🛠️
https://t.co/s1ItxKMcbn
🤖🏆We are honored to share that our system secured ⭐Global Top 3 ⭐in the ICRA 2026 Official Online Simulation Competition — a flagship event of IEEE ICRA, the world’s most prestigious conference in robotics and embodied intelligence!
#RoboParty#ICRA2026#Robotics
@theonlyAyo DMs are now open! Feel free to hit me up for tech questions, collaboration ideas, or just to geek out about humanoid robotics. Looking forward to connecting! 🤖
1/
Humanoid robotics doesn’t need more demos. It needs more rebuildable baselines.
So we open-sourced RoboParty ROBOTO ORIGIN: hardware + motion control + bring-up + validation.
Built in 120 days — from zero to 3 m/s running.
Let’s make humanoids reproducible.
Humanoid robotics shouldn’t be a solo demo show—it’s a party for everyone
🎉We spent 120 days tripping over every possible bug to build a 3m/s full-stack baseline, and now it’s all open-sourced.
Head over to GitHub to grab the code & hardware designs.
Come play, and feel free to roast our bugs!
#RoboParty #OpenSourceRobotics
3/
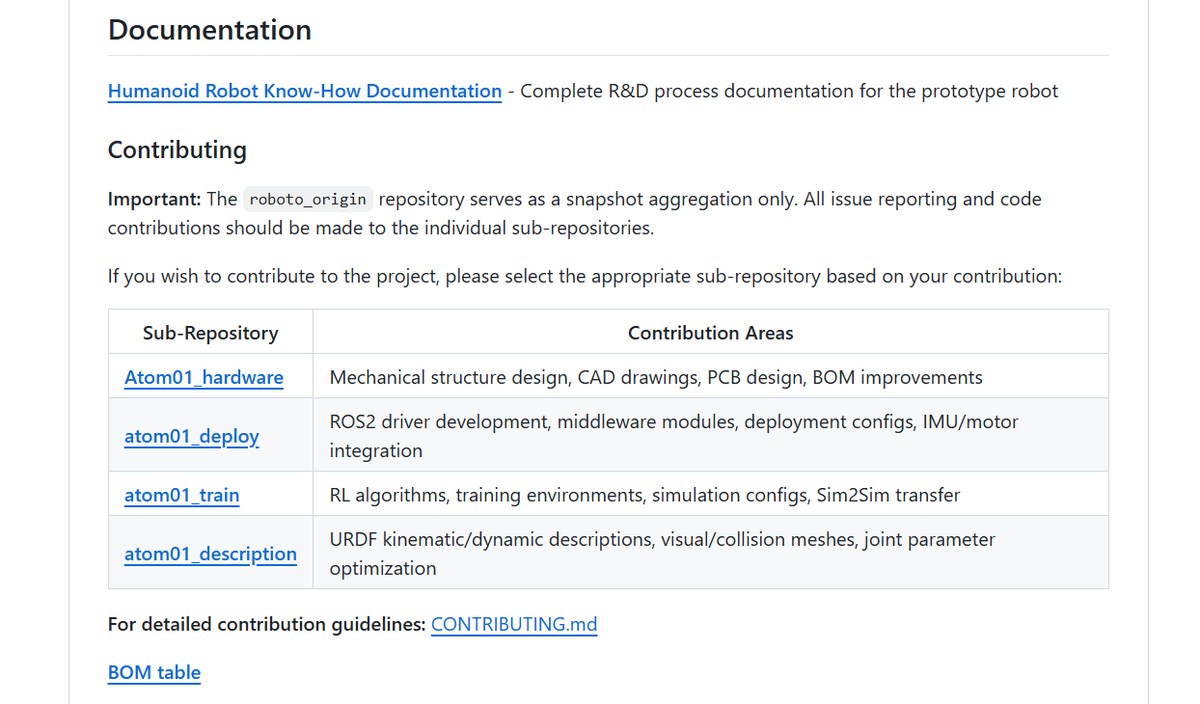
What we open-sourced is not fragments.
We’re publishing the full engineering loop:
sourcing → assembly → calibration → locomotion control → training → validation
That’s the part everyone keeps reinventing.