Weekend project completed: light box upgrade for transferable policies; 💙 to @RobotLearningCo for sharing the BOM. My hope is that this will allow reliable deployment on different systems with similar setup - towards a 🤖 DK-1 policy AppStore
I 💙 my @RobotLearningCo DK-1 - today first rollouts of training from Wan 2.2 + ActionExpert - no VLA base .. with ~3h teleop demos. Currently training on 2 more hours I recorded today. Many things to improve - but feels like �� magic. Super 😊 right now.
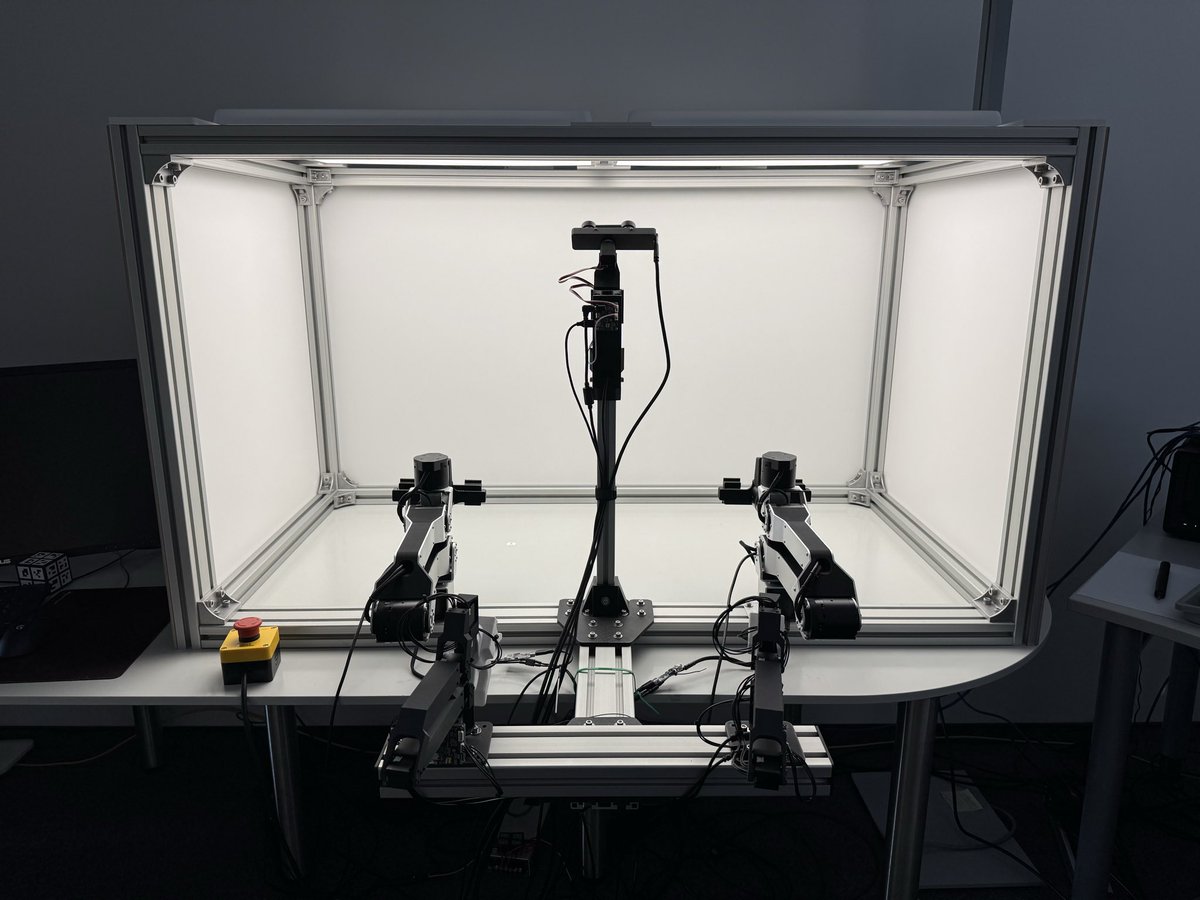
TRLC-DK1 v0.3 is out! We did some cool upgrades:
- USB3.0 cams → USB3.1 can easily handle 3x 720p60 MJPEG streams
- LeRobot plugin support → it will auto-detect the trlc_dk1 package
- More robust mechanical parts & electronics
Full changelog: https://t.co/YbS7mt5oSD
We (@FeduniakS, @PashaRizali) have been basically living in the lab working non-stop to push physical AI fordward. We are building a robotics stack of the future for continual and reliable deployment of physical AI systems.
Thanks a lot @JannikGrothusen for lending us the arms!
`crazy_random_light` is one of the domain randomization options in RoboTwin 2.
The clip features DK1 arms which I recently ordered from TRLC (@JannikGrothusen). I now created a URDF for synth data collection and visualization.
Today I fixed the follower arms to a profile bar and started experimenting with new leader–follower setups.
This speaker desk I found on Amazon is the first of three.
I like the laptop‘s position in the bottom tray: Doesn’t block view and still accessible for quick code changes.
What I still haven’t figured out is the ideal horizontal distance between both the leader and follower arms to make teleop feel more natural.
Introducing TRLC-DK1-X: An accessible humanoid data collection platform.
It features two 6+1 DOF leader-follower arm pairs and three ultra-wide FOV cameras, integrated for learning static, bimanual manipulation tasks.
Order now for $4,999.
A small but powerful modification to the GELLO handle: mounting it at a 45° angle allows both the robot and the operator to be in a natural position while collecting data.
.STL and .STEP in GitHub repo (🧵)
I built an open source dev kit for AI-native robotics:
- it’s all-in-one (includes leader arm and cameras)
- allows to deploy autonomous policies in under a day
- can now be ordered for $2,999
🧵 (1/n)
If you're using @trossenrobotics or @ARX_Zhang arms, you shouldn't buy the expensive leader variants.
We're open-sourcing our leader design, which costs under $200 and is kinematically equivalent to both arms at 60% scale.
Designed by the one and only @KasparJanssen
The Robot Learning Company (@RobotLearningCo) makes automation accessible beyond factories by building affordable AI-powered robot arms to automate repetitive, stationary tasks.
Congrats on the launch, @JannikGrothusen!
https://t.co/4KEKldEuPC