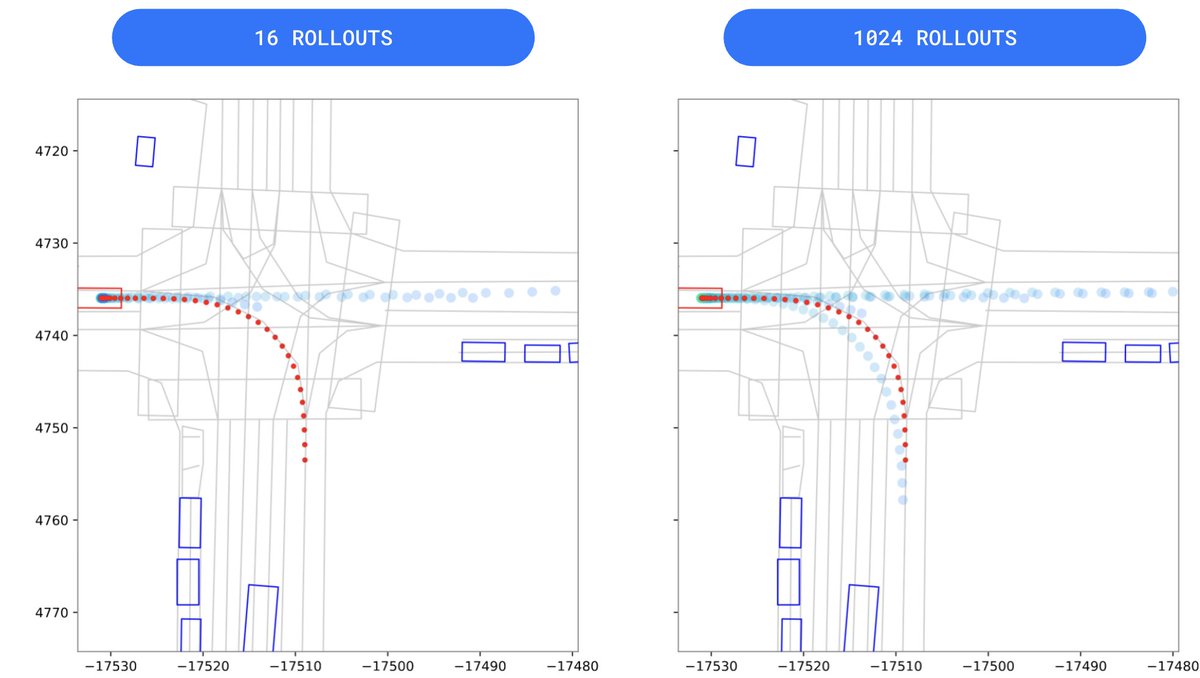
Our research is driving the #AutonomousVehicle industry forward. 🚘➡️ We’ve found that #AI scaling laws hold true in AV software and real-world performance can be improved by increasing training data and compute. Take a deeper dive: https://t.co/ljFKVnTqSh
Headed to @CVPR?
Join our full day tutorial titled, “All You Need to Know About Self-Driving,” on Tues, June 18 at 9am in room Summit 445. We’ll also present our paper, UnO: Unsupervised Occupancy Fields for Perception and Forecasting, on Thurs, June 20!
https://t.co/zmbZXEe5l1
Introducing our Occupancy Foundation Model, UnO! 🪄🧙♂️
Simple, fast, and it works like a charm to perceive and forecast any object out there!
Check it out https://t.co/nX8MGk0CzF
How can we make self-driving systems robust to out of distribution scenarios? We investigate this in our #CVPR2024 paper "UnO: Unsupervised Occupancy Fields for Perception and Forecasting".
Website: https://t.co/95tT3iMy1a
ArXiv: https://t.co/p6roKRRo0G
Excited to share a new foundation model for self-driving, Copilot4D.
Paper: "Learning Unsupervised World Models for Autonomous Driving via Discrete Diffusion", accepted to #ICLR2024
Arxiv: https://t.co/CRkK2FSMXG
Blog: https://t.co/BpjYDmVZJg
Video: https://t.co/V4h4tDSlX9
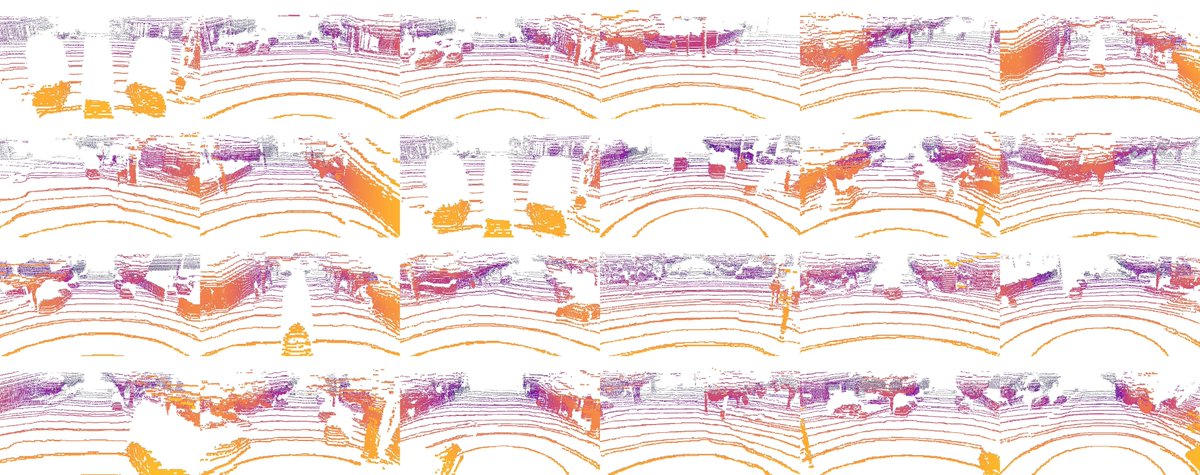
Today, we are excited to unveil our latest research, Copilot4D: the first foundation model that explicitly reasons in both 3D space and time.
Read more about this breakthrough in AI for the physical world in our blog: https://t.co/WWY4NvEq6t
How can we generate high-quality auto-labels for self-driving LiDAR data without a human in the loop? 🚗
Check our @corl_conf paper LabelFormer, a simple, efficient, effective transformer-based model to refine object trajectories for auto-labelling.
More: https://t.co/U9e4KlTGZR
Check out this thread from my colleague @BenAgro4 to learn more about our exciting work on implicit occupancy flow fields for self-driving!
Fantastic work with @BenAgro4@QuinlanSykora and @RaquelUrtasun that will appear as a highlight in #CVPR2023
https://t.co/c3KLRlhMs4
How can we design more expressive perception and motion-forecasting systems for self-driving? In our paper "ImplicitO: Implicit Occupancy Flow Fields for Perception and Prediction in Self-Driving" #CVPR2023, we introduce ImplicitO - https://t.co/CU0b88muwl
How can we design more expressive perception and motion-forecasting systems for self-driving? In our paper "ImplicitO: Implicit Occupancy Flow Fields for Perception and Prediction in Self-Driving" #CVPR2023, we introduce ImplicitO - https://t.co/CU0b88muwl
How can we train an unsupervised object detector from raw sequences of point clouds in self-driving scenes, without any human labels?
In our paper “Towards Unsupervised Object Detection from LiDAR Point Clouds” #CVPR2023 , we introduce OYSTER - https://t.co/NWPpJd7IAC
Innovation and purposeful research are core to our company. We’re excited to unveil Waabi’s Research Hub, a repository for us to share our research and breakthroughs. Learn more here: https://t.co/pwr1gDIPXG
Had a great time presenting our work at ICRA today!
If you are interested in knowing more about GoRela, happy to see you at our poster session this afternoon (15:00 - 16:40, Pod 36).
Arxiv link: https://t.co/TbUfniMz7Y
We’re excited to join the International Conference on Robotics and Automation (ICRA) this week! Our research team will be presenting two papers, including a paper nominated for an Outstanding Best Paper award. Check out the finalists for the award here: https://t.co/DBd1TYvdTg