We’re rolling out an upgrade designed to help robots reason about the physical world. 🤖
Gemini Robotics-ER 1.6 has significantly better visual and spatial understanding in order to plan and complete more useful tasks. Here’s why this is important 🧵
My favorite part of working on Genie for the past few years has been seeing the unexpected things people do with it. Super excited to share Project Genie with US Ultra Users, can't wait to see what you all create with it!!😀😀😀
Google DeepMind 🤝 @BostonDynamics
Our new research partnership will bring together our advancements in Gemini Robotics’s foundational capabilities to their new Atlas® humanoids. 🦾
Find out more → https://t.co/Z4fL9ixjW3
Generalist robots need a generalist evaluator. But how do you test safety without breaking things? 💥
🌎 Introducing our new work from @GoogleDeepMind:
Evaluating Gemini Robotics Policies in a Veo World Simulator
https://t.co/ZjvpYXFddZ
🧵👇
Interacting with Gemini Robotics 1.5 is so fun! Our Embodied Reasoning model planned the multi-step task and orchestrated our Vision Language Action model for precise execution!
Gemini Robotics 1.5 is not only general, but also fairly dexterous! Enjoy some fun videos of robot doing insertion, zipping, and more (remember this is the *same checkpoint* that also controls two other very different robots) 😆
Excited to share our latest work on Gemini Robotics 1.5! Our model can effectively learn from experience of drastically different robots, think on its own, and act as an agent. It’s an important step towards creating a general, intelligent, and friendly robot!
We’re making robots more capable than ever in the physical world. 🤖
Gemini Robotics 1.5 is a levelled up agentic system that can reason better, plan ahead, use digital tools such as @Google Search, interact with humans and much more. Here’s how it works 🧵
How do imbue robots with the ability to imagine the world and complete tasks better? Join us at CoRL 25 workshop on Robotics World Modeling and share your latest work in this area!
🤖🌎 We are organizing a workshop on Robotics World Modeling at @corl_conf 2025!
We have an excellent group of speakers and panelists, and are inviting you to submit your papers with a July 13 deadline.
Website: https://t.co/JVpm4Vrnts
How can we train and apply world models that step towards modeling the physical world?
Come join us at ICML 2025 workshop on Building Physically Plausible World Models to learn more from the top experts and share your own research and insights!
https://t.co/eWpHP909G3
Complementary to Gemini Robotics -- the massive vision-language-action (VLA) model released yesterday -- we also investigated how far we can push Gemini for robotics _purely from simulation data_ in Proc4Gem: 🧵
We’ve always thought of robotics as a helpful testing ground for translating AI advances into the physical world. Today we’re taking our next step in this journey with our newest Gemini 2.0 robotics models. They show state of the art performance on two important benchmarks - generalization and embodied reasoning - which enable robots to draw from Gemini’s multimodal understanding of the world to make changes on the fly + adapt to their surroundings. This milestone lays the foundation for the next generation of robotics that can be helpful across a range of applications.
Meet Gemini Robotics: our latest AI models designed for a new generation of helpful robots. 🤖
Based on Gemini 2.0, they bring capabilities such as better reasoning, interactivity, dexterity and generalization into the physical world. 🧵 https://t.co/n230QbZpnd
Announcing the 2nd Earth Rover Challenge: an "AI vs Gamers" global navigation competition (to be held #ICRA2025 in May in Atlanta)
Co-organized with researchers from Deepmind, Meta & academia
A thread 🧵 - 1/n
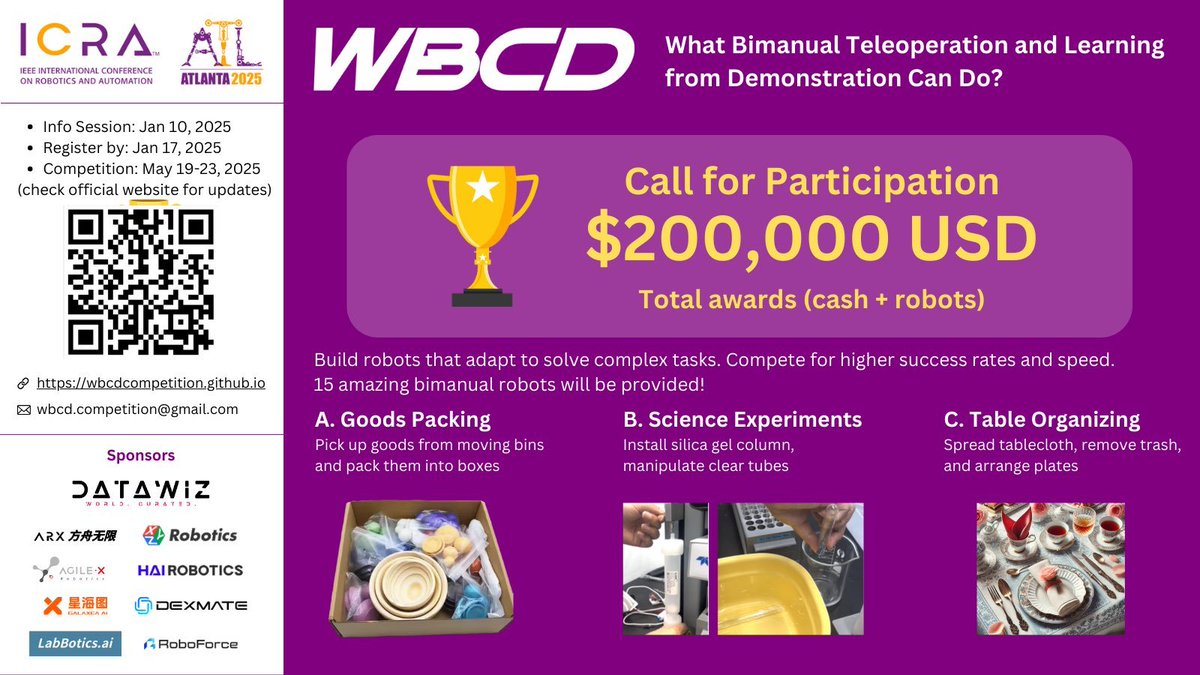
Got ideas for bimanual robots tackling real-world challenges? Check out the WBCD (What Bimanuals Can Do) competition at ICRA 2025! We have physical robots, realistic tasks, and amazing prize for those that extends the boundary of what robots can do!
Welcome to the world, Gemini 2.0 ✨ our most capable AI model yet.
We're first releasing an experimental version of 2.0 Flash ⚡ It has better performance, new multimodal output, @Google tool use - and paves the way for new agentic experiences. 🧵 https://t.co/4V1gJ9yngt
Wow this is really good! In some way I’m more impressed that it’s teleoperated than if it’s autonomous cuz it feels very plausible to develop a highly specialized RL-based policy to do this, but being able to tele op this opens up a wide range of data to be collected.
How can we leverage the common sense knowledge from a VLM to understand the progress (and even quality!) of a robotics trajectory? Check out GVL on a surprisingly simple and elegant way to do that! Awesome work by Jason!
Excited to finally share Generative Value Learning (GVL), my @GoogleDeepMind project on extracting universal value functions from long-context VLMs via in-context learning!
We discovered a simple method to generate zero-shot and few-shot values for 300+ robot tasks and 50+ datasets using SOTA VLMs like Gemini (Try out the demo on our website on your robot video today!)
I worked a lot on leveraging foundation models as guidance for robots in my PhD, and to me, this result forges a new frontier in how we can use foundation models for robot learning, given its broad applicability independent of embodiment and task types. Quite excited about how we can build on this work as a community!