Winners!
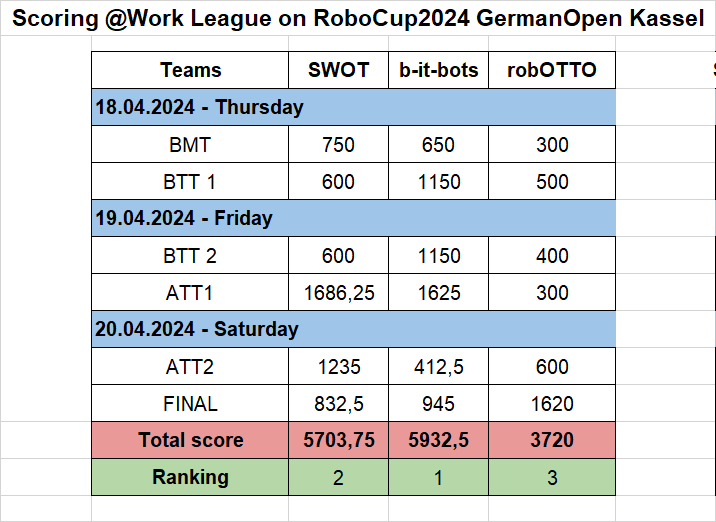
After an exciting finals, we've won the #RoboCup@Work at #GermanOpen#rcgo2024!
Great performances from team SWOT and robOTTO, who we hope to see again at the world championships in Eindhoven later this year.
German Open Day 2:
atWork: Two successful runs for BTT 2 and ATT 1 means that we're still in the lead. We also successfully completed the technical challenge: Coworker Assembly Test.
Today we will have ATT 2 and 9 am and the finals at noon!
German Open Day 2:
atHome: we worked on improving person detection with facial recognition, improving the interface for speech recognition by showing the person when the robot is listening, etc.
German Open Day 1:
In atWork, despite some strange camera issues, we had two good runs which put us in first place currently. Looking forward to BTT2 and ATT1 on day 2.
German Open Day 1:
In atHome, we were unfortunately not able to complete either of the first round tasks today due to issues with the arm and speech recognition.. We plan to continue working on improving the tasks tomorrow, though there are no more official runs for us.
We (and our robots) have arrived in Kassel for #RoboCup German Open, and are setting up and testing for the competition in the next few days! #rcgo2024
Our @Home and @Work teams are preparing for #RoboCup German Open by organizing an internal competition! Tomorrow the @Home team will run the Receptionist and Stories Groceries tasks, and the @Work team will run the Advanced Transportation Test 2 and the Finals. Good luck!
As we look forward to the new year, here is a look at some highlights of the #robotics#competitions we participated in last year.
https://t.co/oo0T4ZIwcI
We're heading back to Germany tomorrow after a successful week. Thanks for the great hospitality and organization of the competition @AssistiveLab! Also for letting us borrow a gripper after ours stopped working mid competition 😅
@METRICSproject1#robotics#competition
For the plates and cups we used the pointcloud to select a grasp location on the rim. A second object detection model was used to detect the handles of the brush and dustpan to grasp them by the handle.
Object Sorting task benchmark:
The task was to sort objects into cutlery, tableware, personal care items and cleaning tools. The main challenge was to select a grasping pose for certain objects.
For the last competition of the year, we are in Florence for the 2nd @METRICSproject1 HEART-MET field campaign! This time we are performing the object and person detection functional benchmarks, and the object sorting task benchmark.
#robotics#benchmarking
🚀 Kickstarting the HEART-MET Field Campaign 2023 at the University of Florence! Setting days are here, with teams prepping their robots & capturing data. Exciting milestones ahead! 🔍 #metrics#heartmet#assistive#robotics#Unifi
🤖 At the Episode 5 of #ERLMKSmartCityChallenge, METRICS emphasized healthcare robotics, fusing HEART-MET benchmarks with tangible tasks.
We are thanking the participating teams:
🥇 b-it-bots
🥈 homer@UniKoblenz
Elevating robotics in urban settings! 🚀
#healthcare#robotics