Developing pervasive, persistent, and perceptive robots for the real world @UTIAS @UofTRobotics! Led by @domo_mr_roboto and located in Toronto, Canada.
📦 Philippe Nadeau presents Stable Placement Planning. Placing objects in complex environments is tough! His method prioritizes contact points first, drastically reducing planning time for autonomous manipulation. 📄 https://t.co/8I5sjszMZu
Will you be attending #ICRA2026?
The STARS Lab is heading to #ICRA2026 in Vienna! 🇦🇹🤖
We're thrilled to share our latest work in autonomous space operations and robotic manipulation. Check out the presentations from our researchers in the thread below 1/3🧵👇 #Robotics#ComputerVision#UofT
🚀 Selina Leveugle tackles anomaly detection in extreme space lighting with MRAD and the photorealistic ALLO dataset.
🗣️ RA-L Oral: Tue, Jun 2 | 12:00 PM (TuAT2.7)
📌 Workshop Poster: Mon, Jun 1 | 3:05 PM 📄 https://t.co/z2BcbjJ693💻 https://t.co/1OcYMEVF7L
How do we keep rovers safe on uncertain terrain millions of miles away? 🚀
STARS Ph.D. student @OLamarre introduces a risk-averse approach to global planetary mobility, using adaptive planning to navigate unpredictable orbital maps. 🛰️🤖
Read more: https://t.co/EoVs3m5OXB
📅 FaVoR Presentation: Nectar Track Poster Session – Mar 22
Huge congratulations to all our authors! Looking forward to connecting with the 3D vision community in Vancouver. Drop by our sessions to say hello. 👋
🧵4/4
@UofT@UofTRobotics#EventCameras#Robotics#ComputerVision
🚀 Catch STARS Lab at #3DV2026 in Vancouver! We are happy to present two of our team's recent works.
1️⃣ VibES: Induced Vibration for Persistent Event-Based Sensing 🔗 https://t.co/NCaV2v3K3I
🧵👇 1/4
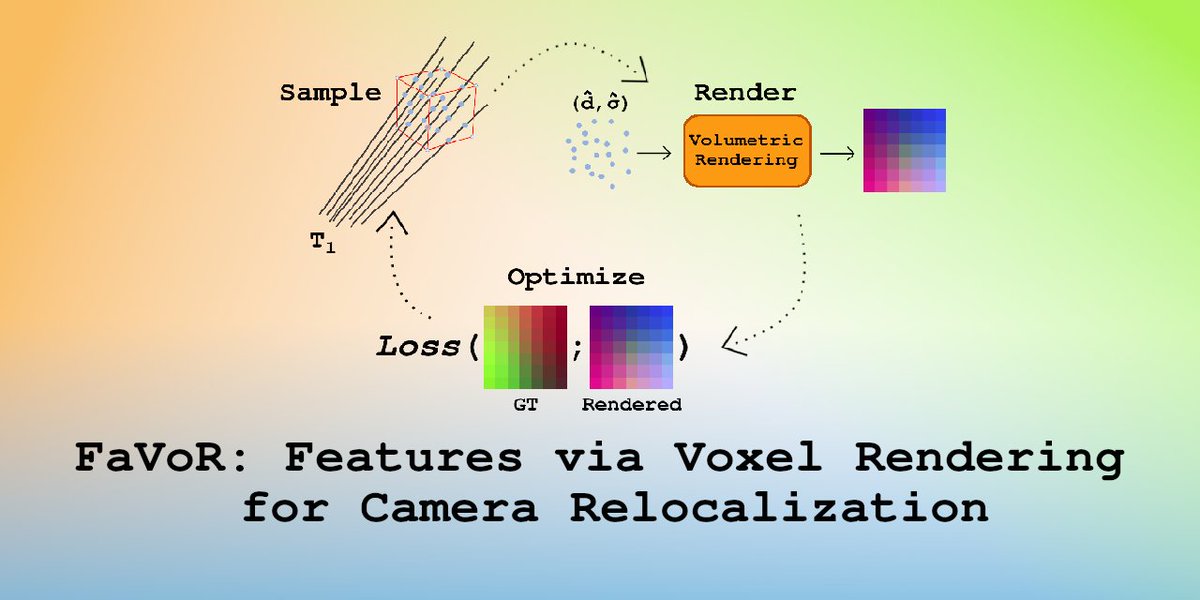
2️⃣ FaVoR: Features via Voxel Rendering for Camera Relocalization
Thrilled that FaVoR (WACV 2025) is in the 3DV Nectar Track! We explore robust camera relocalization by leveraging voxel rendering for high-quality feature generation.
🔗 https://t.co/94Ghz3m5NL 🧵👇3/4
🚨 We're recruiting MASc & PhD students for 2026! Work at the intersection of robot perception, planning & manipulation—from theory to real robots. We welcome physics, math, CS & engineering applicants. 2 weeks left to apply: https://t.co/uRPsmyOyu5
We're excited to welcome Alessandro Potenza to our group! Alessandro will be studying machine learning on manifolds for robot manipulation. Welcome, Alessandro! 👋
Reminder: @trevorablett will present our work on Multimodal and Force-Matched Imitation Learning at #ICRA25 tomorrow in Vision-Based Tactile Sensors 2, Session TuBT4, room 304, at 11:30 a.m. Stick around to ask questions during the poster session!
Push it to the (demonstrated) limit! To complete difficult tasks with complex contact, our latest work combines a tactile force matching algorithm with imitation learning (IL). @trevorablett will present this T-RO work at #ICRA25 tomorrow!
Learn about it: https://t.co/uJG13VXl3x
Reminder: @trevorablett will present VPACE at #ICRA25 tomorrow in Reinforcement Learning 2, Session TuBT21, room 410, at 11:15am. Stick around to ask questions during the poster session!
Pre-recorded version link below 👇
Just show me what you want, and I'll figure out how to do it...quickly! @trevorablett will present Efficient Imitation without Demonstrations via Value-Penalized Auxiliary Control from Examples (VPACE) at #ICRA25 tomorrow!
Check it out: https://t.co/nBUNWGnXEe
Push it to the (demonstrated) limit! To complete difficult tasks with complex contact, our latest work combines a tactile force matching algorithm with imitation learning (IL). @trevorablett will present this T-RO work at #ICRA25 tomorrow!
Learn about it: https://t.co/uJG13VXl3x
Just show me what you want, and I'll figure out how to do it...quickly! @trevorablett will present Efficient Imitation without Demonstrations via Value-Penalized Auxiliary Control from Examples (VPACE) at #ICRA25 tomorrow!
Check it out: https://t.co/nBUNWGnXEe
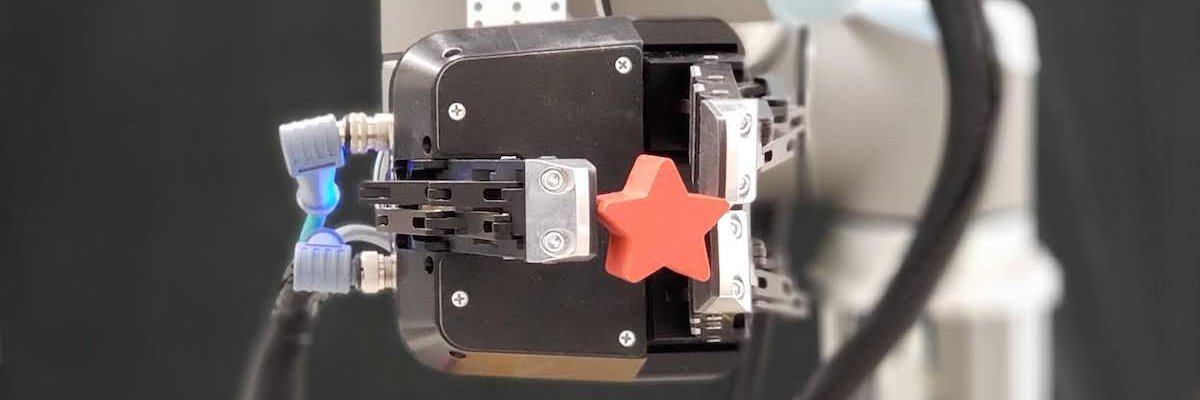
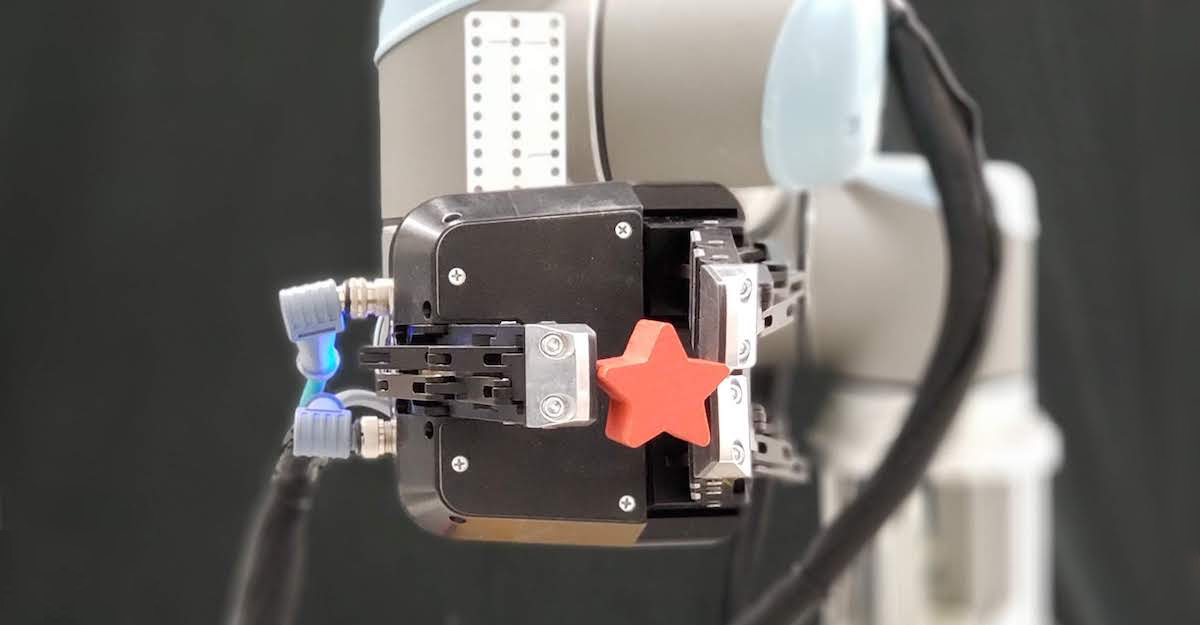
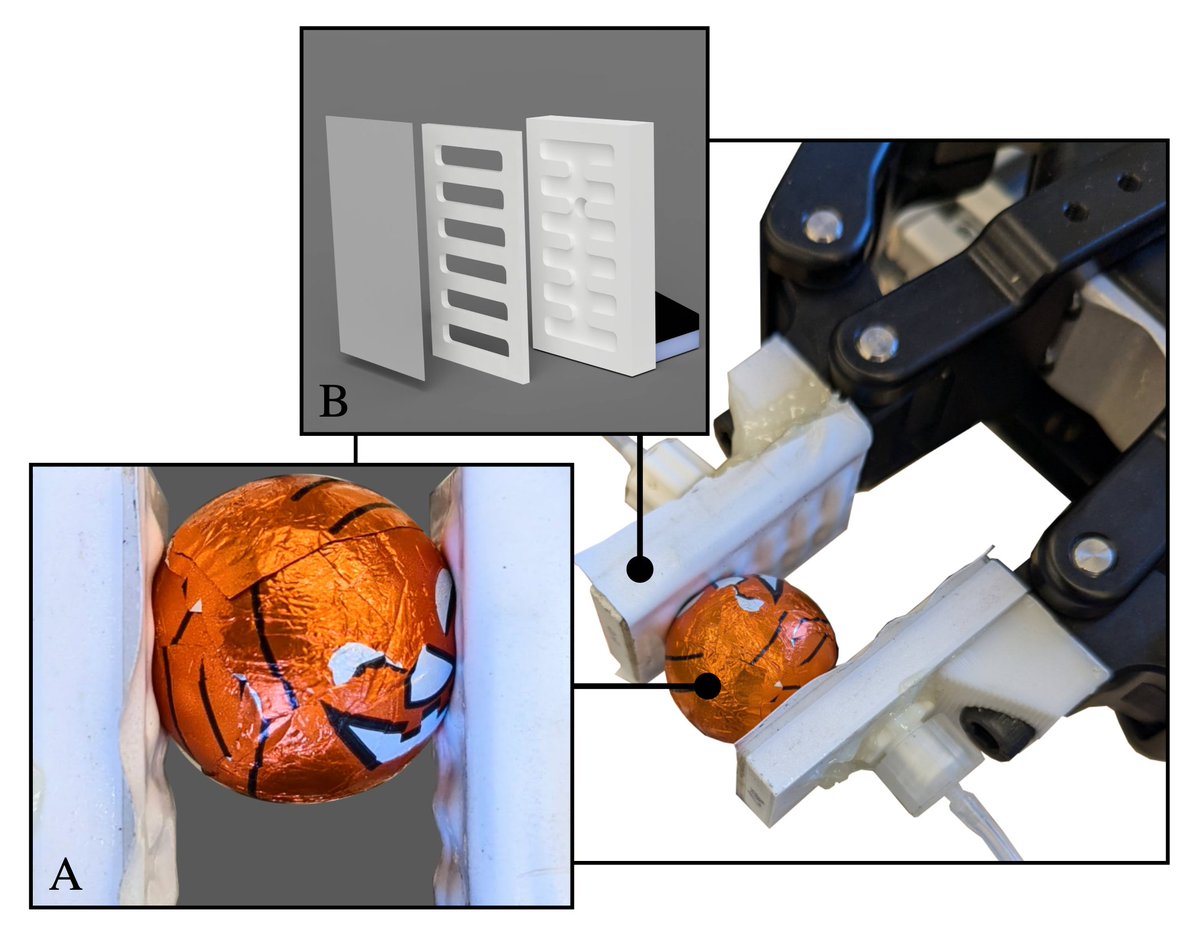
Get a grip! We present a practical and inexpensive gripper fingerpad design that enables active friction tuning through structured pneumatic deflection of the fingerpad surface. MASc graduate Katie Allison will present this work at @IEEERoboSoft!
Paper: https://t.co/ykIdUPxcph
Get a grip! We present a practical and inexpensive gripper fingerpad design that enables active friction tuning through structured pneumatic deflection of the fingerpad surface. MASc graduate Katie Allison will present this work at @IEEERoboSoft!
Paper: https://t.co/ykIdUPxcph
We're excited to welcome Phone Thiha Kyaw to our group! Phone wil be working on long-horizon task and motion planning. Prior to joining STARS, he was with Dyson in Sinagpore. Welcome Phone! 👋
📢 FaVoR: Features via Voxel Rendering for Camera Relocalization
We’re excited to share that @polivicio will present our latest work at #WACV25!
📅 March 1st, Oral Session 1.1 – 3D Computer Vision I
Kudos to @marcocannici@davsca1@domo_mr_roboto
https://t.co/2oHF6Vh4U9
Congratulations to Katie Allison for succesfully defending her Master's thesis! 🥳🎓
Katie developed a structured pneumatic fingerpad for robotic grasping that enable tunable grip friction (for next-level in-hand manipulation). Each fingerpad costs less than 50 cents to make!
🎄✨ An early Christmas gift from our lab!
Our paper "FaVoR: Features via Voxel Rendering for Camera Relocalization" is accepted at #WACV2025!
Led by @viciopoli, with @marcocannici & @davsca1!
🎁Preprint, code and models: https://t.co/94Ghz3m5NL
#ComputerVision#AI#Robotics