Glad I didn't make a mistake switching my (game)dev team to Cursor (from Calude): the best harness on the market with access to models from top providers while accessing ones from the most promising future provider, Cursor itself, led by SpaceX and their orbital data centers 😎
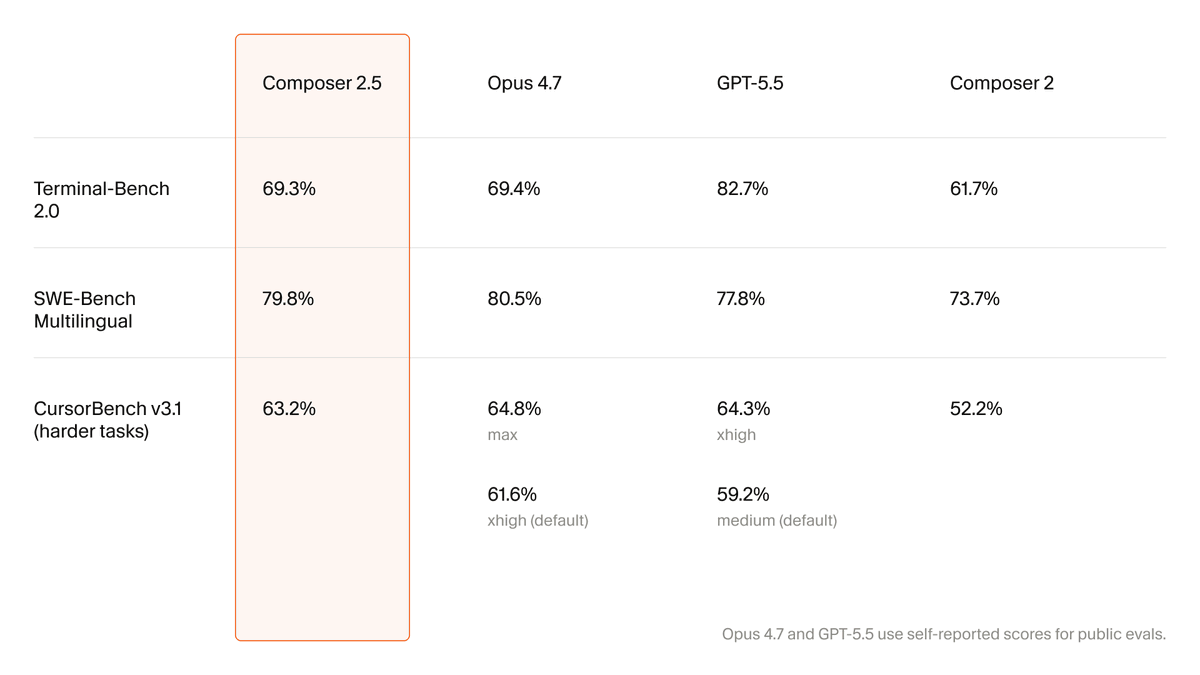
Introducing Composer 2.5, our most powerful model yet.
It's more intelligent, better at sustained work on long-running tasks, and more reliable at following complex instructions.
For the next week, we’re doubling the included usage of the model.
@Polymarket AI did you actually decode communication patterns in animals or did you make some shit up?
"good catch, I just made some shit up. let me try again"
Evidence of exceptional ability and asking how they solved hard problems down to the brass tacks level is what matters.
Those who actually deserve credit know the details of the solution, because it was so hard it got seared into their brain. The phonies and posers who falsely claim credit will flounder at the second or third level of detail.
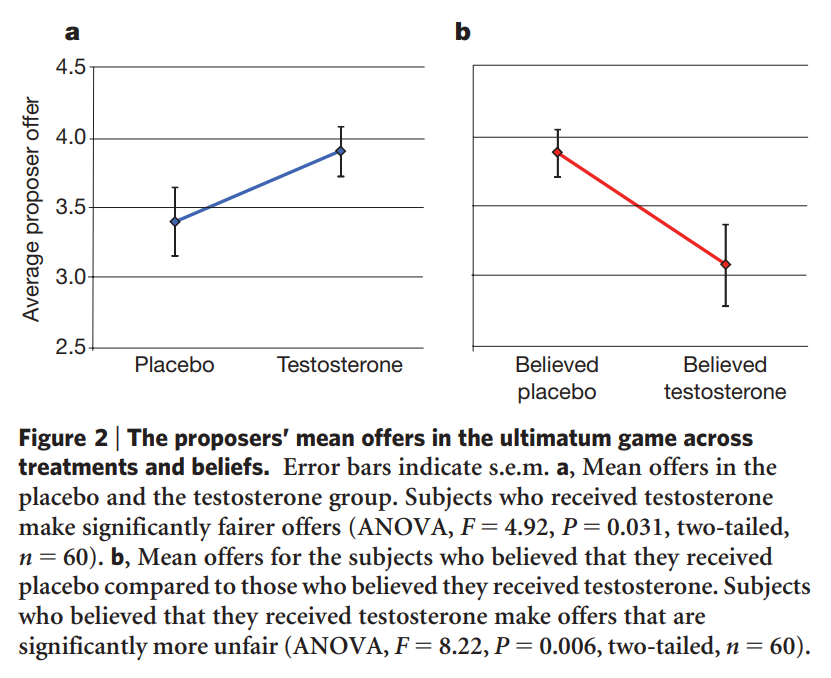
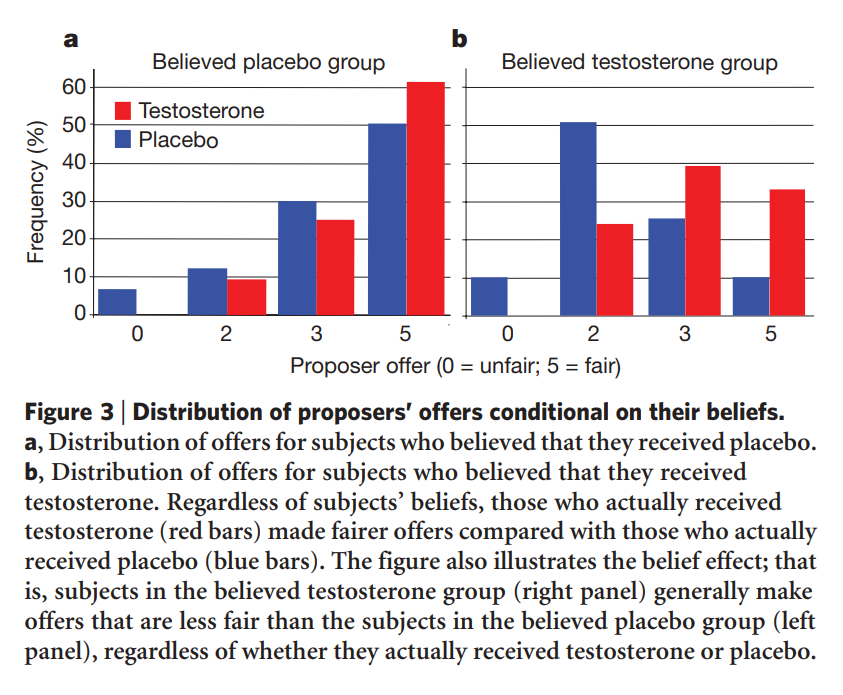
Darles testosterona a las mujeres hace que se comporten de manera más justa y menos conflictiva. Sin embargo, las mujeres que creen que han tomado testosterona —pero que en realidad han tomado placebo— se comportan de manera más agresiva y más injusta.
This is WILD!
MIT just solved one of the hardest unsolved problems in robotics (Save this).
For decades, the fundamental problem with soft robots and wearable exoskeletons has not been compute or AI, it has been actuation.
The moment you try to give a soft robot meaningful strength, you run into the same wall every engineer has hit since the field began, fluid-driven systems require external pumps, hydraulic reservoirs, and heavy infrastructure that makes the entire thing impractical to wear or embed into fabric.
MIT's new Electrofluidic Fiber Muscles solve that problem by eliminating external infrastructure entirely.
The key insight is electrohydrodynamic pumping using electric fields to generate pressure directly from electricity, with no moving parts, no motors, and no external fluid reservoir.
The fibers are less than 2 millimeters thick, can be woven into fabric like ordinary textile, and operate in complete silence because nothing physically moves inside them, it is just ions propelling fluid through a closed circuit.
The performance numbers published in Science Robotics are not conceptual, they are empirical results from actual hardware.
These fibers achieve a power density of 50 watts per kilogram, matching skeletal muscle, with a contraction strain of 20% and a response time of 0.3 seconds.
A single bundled configuration lifted 4 kilograms, 200 times its own weight while a separate configuration drove a robotic arm through a 40-degree bend compliant enough to safely complete a human handshake.
Another configuration launched objects in under 100 milliseconds, which is faster than a human flinch reflex.
The design mirrors biological muscle architecture in a way that prior artificial muscle approaches never achieved.
The fibers are organized into antagonistic pairs, one contracts while the other extends, exactly like biceps and triceps and because the system runs in a closed loop, the relaxing fiber serves as the fluid reservoir for the contracting one, which is what allows the whole system to operate untethered with no external tank.
The applications are not hypothetical but rather are the exact use cases the industry has been waiting years for the hardware to catch up to.
Exoskeletons for physical labor, prosthetic limbs that move with the natural compliance of biological tissue, assistive garments for patients with motor disorders, and soft robots capable of safe physical contact with humans are all immediately unlocked by a muscle technology that is silent, lightweight, and weavable into clothing.
The deeper significance is what this technology does when it meets the AI robotics wave that is already underway.
Every major humanoid robot program, Figure, 1X, Boston Dynamics, Tesla Optimus is currently bottlenecked by the same hardware limitations these fibers address, actuators that are too rigid, too loud, too heavy, or too dependent on infrastructure to operate naturally alongside humans.
Electrofluidic fiber muscles do not just solve a materials science problem but rather they remove one of the last physical barriers between robots that live in labs and robots that live in the world.
It's 2026 and your CEO just sent you a 2,400 line pull request.
You get a cup of coffee and sit down to review it.
It's a disaster. A dozen unrelated refactors. Unused methods with names like `convertFromBase10` and `normalizeBeforeSerialization`.
You catch a few hardcoded API keys, but that's ok. It's part of the dance. They didn't consider that someone might look at this diff. Here's a comment buddy.
They respond in an hour (after Copilot, qodo, CodeRabbit and Greptile finish their reviews) saying we shouldn't worry about "implementation details" anymore, those are relics of the past. Hey let's jump into a room and figure it out. We can't just agree to disagree, this is probably my last job in tech and I can't watch this fucker burn the place to the ground.
The PR merges and goes to prod. You feel a shared sense of apathy and dread with Hannah the intern (she has to review his AI generated social media posts ever since Grok got too imaginative).
That night you go to sleep and have nightmares of that code. You can still see the shapes of it on the backs of your eyelids.
You go to work the next day ready to quit. You no longer understand the system. There is no foundation. Time to use those savings and an SBA loan to buy a liquor store and never login to GitHub again.
Three years since the first flight of Starship, the next generation is here. New ship. New booster. New engines. New pad and new test site. SpaceX engineers are working to solve one of the most difficult engineering challenges in history: developing a fully, rapidly reusable rocket