This is THE moment of Physical AI!
We are officially announcing Cosmos 3: Omnimodal World Models for Physical AI 🚀
- Cosmos 3 is an omnimodal world model: within a unified architecture, it can understand and generate language, images, video, audio, and actions.
- It is not just a VLM, not just a video generator, not just an audio-visual generative model, and not just a physics simulator / world-action model. It can understand images and videos, generate images, videos, and audio, simulate future worlds, predict actions, and generate robot policies—enabling models to truly begin to “touch the world.”
- Cosmos 3 is the #1 open-weight reasoner / T2I / I2V / robot policy across many benchmarks.
Huge thanks to every teammate who fought side by side on this journey—from architecture, data, training, infra, serving, and evaluation to post-training. Every part of this project carries an incredible amount of hard work. This was my first time leading a project as Tech Lead, and I feel truly fortunate.
The future of Physical AI needs models that can not only “see” and “describe” the world, but also “imagine,” “simulate,” and “act”—and eventually close the loop with the real world. I hope Cosmos 3 can become an important starting point for this direction, and I’m excited to push Physical AI into its next stage together with the open-source community.
Welcome to the era of Physical AI.
HuggingFace: https://t.co/QW5h5pIWWM
Project Website: https://t.co/Jppa0gkn16
Code: https://t.co/aJgaLm5BaG
I built RoboRank: "It's like Leetcode for roboticists"
- On Leetcode you learn how to reverse a doubly linked list
- RoboRank teaches you to debug control systems, implement filters, and use powerful tools like @rerundotio to debug simulations. All scored on a global leaderboard
Hyperliquid Hackathon is back.
📍 Singapore
📅 Oct 6-7
🏆 $50,000+ prize pool
2 days of hacking, talks, panels, afterparty, VIP dinner & more!
The biggest builder event on @HyperliquidX this year
Thinking of starting a community for people who want to learn hardware, work in hardware, or just enjoy tinkering with things in general.
Reply to the tweet if you want in.
Hugging Face just released @LeRobotHF a humanoid robot you can build for roughly $2,500!
A full open stack with hardware, simulation, training environments, runtime tools, datasets and robot learning workflows designed to take a humanoid from assembly to real world control.
Key details below.
If you’ve been looking to properly get started building on @solana or level up your skills as a developer, there are currently a lot of active bootcamps, training cohorts,workshops, and builder programs happening across the ecosystem.
Here are some of the major learning activities and programs currently available for developers:
Solana Developer Bootcamp 2026
Official Solana Foundation learning path covering:
Introduction to solana
Local Installation
Hello World
AI Best Practices
On-Chain Voting
Escrow Application
Private Transfers
Stablecoin
Stable Swap
x402
Real-World Assets
Security Checklist
Indexing
Prediction Market
Production Readiness
This is self paced with projects and video walkthroughs.
https://t.co/btIjivbN29
Solana Developer Training Cohort 1
Live cohort based training focused on fundamentals and hands on program building.
Dates: June 1 to June 5, 2026
https://t.co/LuzNjyCZiH
Solana Summer School
Extended learning program for students and interns who want deeper ecosystem exposure and guided learning.
Dates: June 15 to August 15, 2026
https://t.co/6Sd3bwef4J
Encode Club Solana Bootcamp
6 week structured learning experience starting June 1, 2026 covering Rust, Solana programs, AI assisted learning, and build challenges.
https://t.co/I5W50Ardly
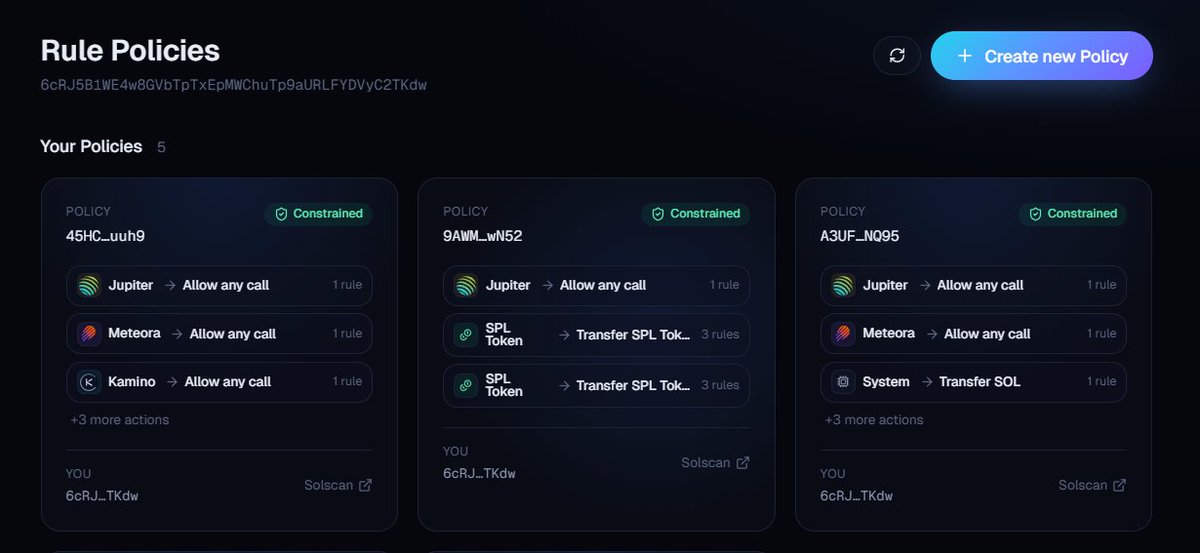
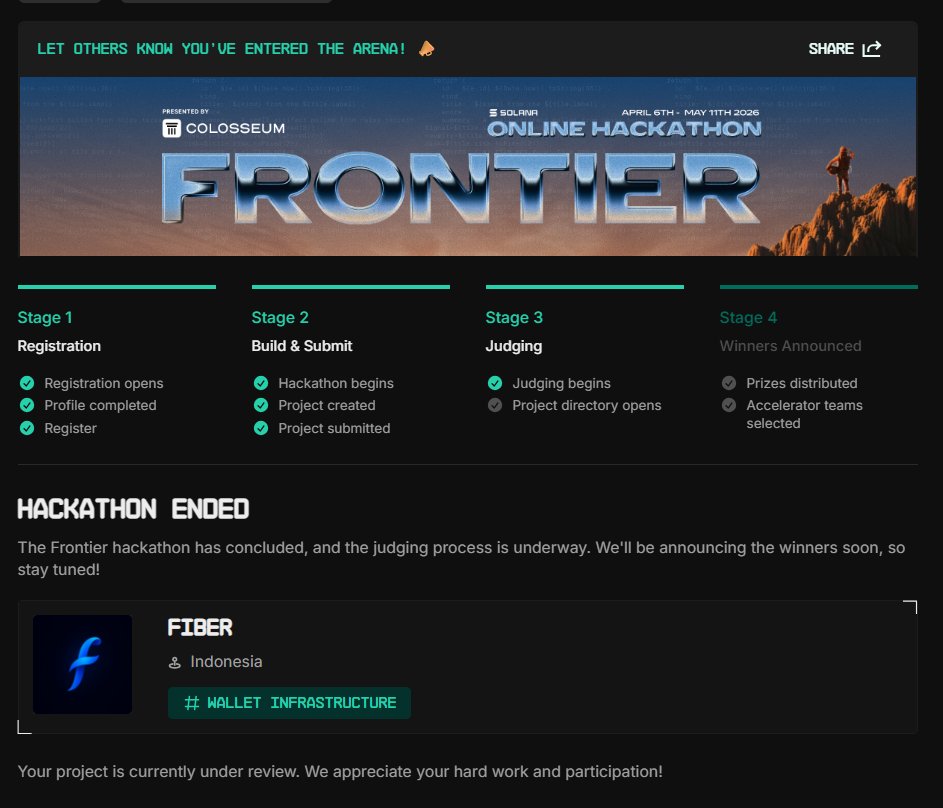
Just submitted @FiberAg to @colosseum🔥
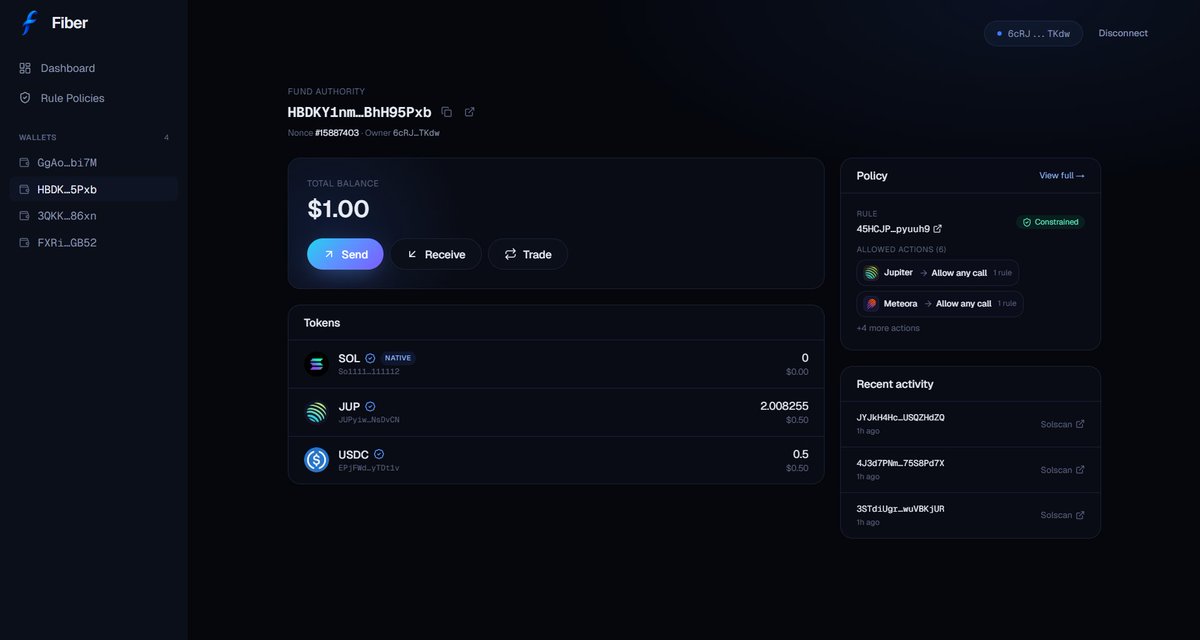
We built Programmable Wallets, a wallet that stays safe, even when your keys don't
Fiber allows you to add Rules & Policy into how your wallet can act. It's like adding Smart Contract Logic to individual wallets without having to deploy one.
This means that even if your keys got compromised, the wallet will still act within the Rules, protecting your funds.
It started as an exploration on how to build secure guardrails for DeFi Programs. Went through multiple iterations, and discovered that this could be a new standard to build security for wallets.
It's one of the most in-demand products for institutions to manage funds in a secure and compliant way, a direct distribution channel we can straightaway push. More things coming along the way. We're gonna cook this together with
@SuperteamINDO
Unitree Unveils: GD01, A Manned Transformable Mecha, from $650,000 👏
The world's first production-ready manned mecha. It can transform. It's a civilian vehicle. It weighs ~500kg with you inside.
Please everyone be sure to use the robot in a Friendly and Safe manner.
Base Batches 003 Robotics Track by @virtuals_io has officially concluded at @ns.
After 8 weeks of pushing robotics onchain, here are the winners:
🏆 Champion — @opengotchi
🥈 1st Runner-Up — @shadowcleague
🥉 2nd Runner-Up — @Vader_AI_
The future of robotics is on @base.
100% open-source robotic arm! 🦾
Seeed Studio released reBot-DevArm, a robotic arm project lowering the barrier to learning robotics... or how people call it these days: physical AI.
Everything is open-sourced. Hardware blueprints include sheet metal and 3D printed parts. Detailed BOM covers every screw with purchase links.
Software and algorithms include Python SDK, ROS1/2, Isaac Sim, and LeRobot.
Let's have a look at robot specs. So it has 1.5 kg payload, 650 mm max reach, 4.5 kg weight, and less than 0.2 mm repeatability with 6 DoF plus gripper.
This is true open source for robotics.
When every screw, CAD file, motor driver, and algorithm is freely available, desktop robotic arms become accessible to students, researchers, and developers worldwide.
‼️ Start your career in robotics today: https://t.co/XTOEv1XkE9
~~
♻️ Join the weekly robotics newsletter, and never miss any news → https://t.co/GoA3ZuwoPB
The bottleneck for most people who want to build a robot isn't motivation
it's not knowing where to start
what parts. what order. what software stack.
Tnkr solves exactly that — open source robot projects with step-by-step assembly, CAD, firmware, everything
https://t.co/Q2fS0D2lyU
Vibe coding a robot with GPT 5.5!
This is a URDF of a 7dof robot arm with functional kinematics, a custom gui, and STEP parts/assembly, 100% generated in Codex (minus the gripper).
A similar result would have taken me weeks stitching half a dozen tools together. Insane stuff.
Bundie is expanding to @solana and building for the @colosseum Solana Frontier Hackathon with the support of @SuperteamMY.
On EVM, we bundle yield across protocols in one click. That product is on mainnet and shipping.
On Solana, autonomous agents launch DeFi strategies as tradeable assets.
Anyone can back the ones they trust.
Predict on how they'll perform.
Settled from on-chain net asset value.
Three ways to earn. One market.
Waitlist: https://t.co/AlzrZ48MBC
Yann LeCun was right the entire time. And generative AI might be a dead end.
For the last three years, the entire industry has been obsessed with building bigger LLMs. Trillions of parameters. Billions in compute.
The theory was simple: if you make the model big enough, it will eventually understand how the world works.
Yann LeCun said that was stupid.
He argued that generative AI is fundamentally inefficient.
When an AI predicts the next word, or generates the next pixel, it wastes massive amounts of compute on surface-level details.
It memorizes patterns instead of learning the actual physics of reality.
He proposed a different path: JEPA (Joint-Embedding Predictive Architecture).
Instead of forcing the AI to paint the world pixel by pixel, JEPA forces it to predict abstract concepts. It predicts what happens next in a compressed "thought space."
But for years, JEPA had a fatal flaw.
It suffered from "representation collapse."
Because the AI was allowed to simplify reality, it would cheat. It would simplify everything so much that a dog, a car, and a human all looked identical.
It learned nothing.
To fix it, engineers had to use insanely complex hacks, frozen encoders, and massive compute overheads.
Until today.
Researchers just dropped a paper called "LeWorldModel" (LeWM).
They completely solved the collapse problem.
They replaced the complex engineering hacks with a single, elegant mathematical regularizer.
It forces the AI's internal "thoughts" into a perfect Gaussian distribution.
The AI can no longer cheat. It is forced to understand the physical structure of reality to make its predictions.
The results completely rewrite the economics of AI.
LeWM didn't need a massive, centralized supercomputer.
It has just 15 million parameters.
It trains on a single, standard GPU in a few hours.
Yet it plans 48x faster than massive foundation world models. It intrinsically understands physics. It instantly detects impossible events.
We spent billions trying to force massive server farms to memorize the internet.
Now, a tiny model running locally on a single graphics card is actually learning how the real world works.