🌟 Update 🌟
We’ve launched the hardware system, and the accompanying software will be released soon. We welcome fellow researchers to join us in improving the design and advancing this tool together!
🌟【New Launch | Fast-UMI】🌟
Struggling with costly and complicated robot data collection? Fast-UMI makes it simple—plug-and-play with no SLAM or calibration needed for end-effector poses.
🔗 Learn more: https://t.co/9QXVkeWLrL
✨ Fast-UMI Highlights ✨
🔹 No need for complex SLAM deployment and calibration—directly obtain end-effector poses
🔹 Plug-and-play design, compatible with various robotic grippers. No need for WSG-50!
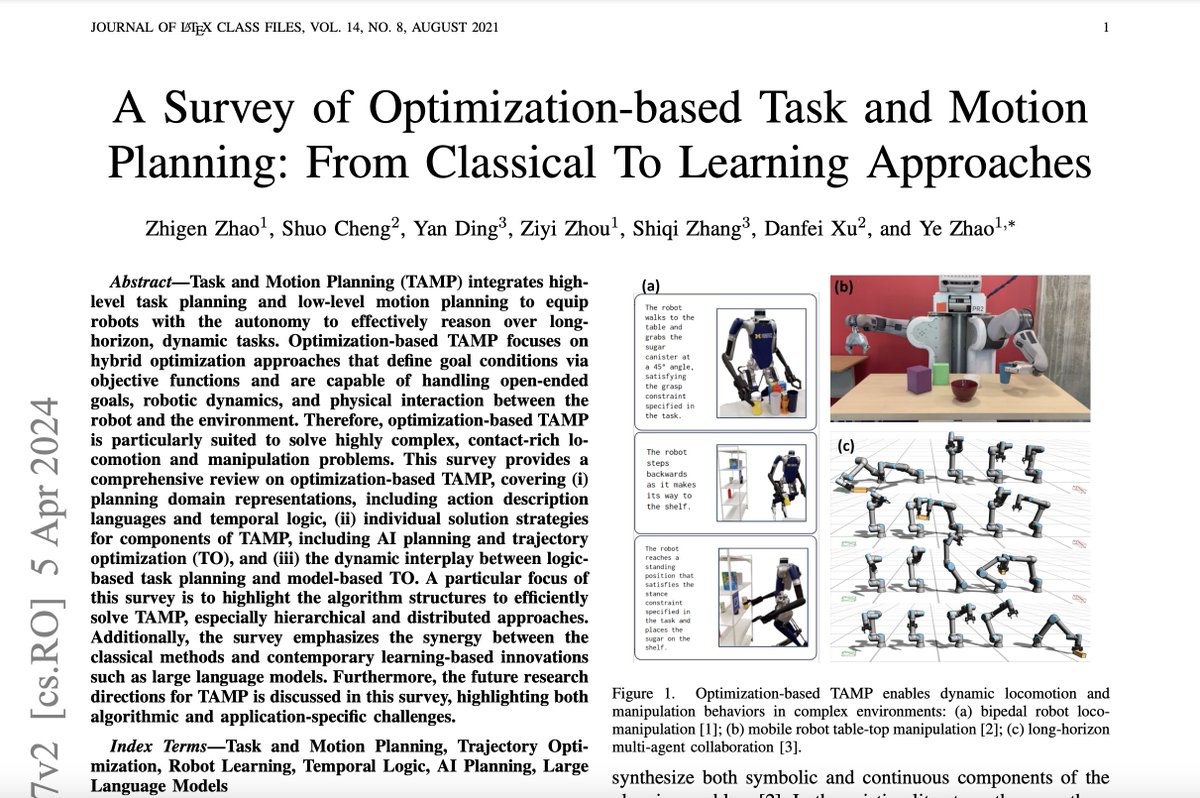
If you're interested in learning SOTA of optimization-based task and motion planning, please give it a read of our recent survey paper, ranging from classical to learning methods. @ZhaoZhigen@ShuoCheng94@yding25@ZiyiZhou2@ShiqiZhang7@danfei_xu
https://t.co/yGwntYRNnO
In COWP https://t.co/nYuLjATA7Y the authors introduce a framework that integrates action knowledge and LLMs to enhance open-world task planning. This enables them to handle novel situations by dynamically augmenting action knowledge.
It took a little longer but our AURO special issue on LLMs in Robotics is finally here: https://t.co/ZsxcX3E5nf
Edited together with @brian_ichter@xf1280@SongShuran with help from the main AURO editor @gauravsukhatme
Let's go over the papers in the special issue 👇
The reason why physical AI is harder than generative AI is because of their respective customers.
Humans can easily forgive any errors, physics is unforgivable.
Our COWP work is part of this special issue. COWP is for robot planning and situation handling in open worlds (new requests, new objects, new situations, etc) by enabling the marriage between LLM-based reasoning and knowledge-based classical planning. https://t.co/kMScbEIwjL
Nice work from @leto__jean 's lab led by Jingyun Yang @yjy0625 and Congyue Deng showing how to build SIM(3)-equivariant representations for manipulation.
A few notes: 👇
See LLM-GROP by Yan Ding and @XiaohanZhang220 at IROS
Extract semantic knowledge from LLMs like GPT to perform multi step object rearrangement on real robots, like setting the table